 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural network modelling of kinematic and dynamic features for signature verification
Paper and Code
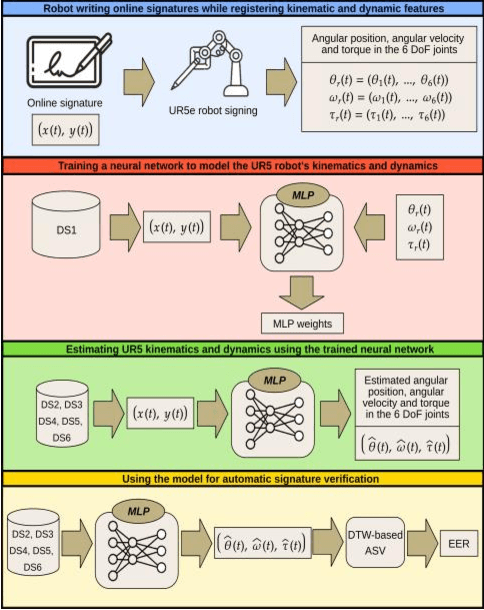
Online signature parameters, which are based on human characteristics, broaden the applicability of an automatic signature verifier. Although kinematic and dynamic features have previously been suggested, accurately measuring features such as arm and forearm torques remains challenging. We present two approaches for estimating angular velocities, angular positions, and force torques. The first approach involves using a physical UR5e robotic arm to reproduce a signature while capturing those parameters over time. The second method, a cost effective approach, uses a neural network to estimate the same parameters. Our findings demonstrate that a simple neural network model can extract effective parameters for signature verification. Training the neural network with the MCYT300 dataset and cross validating with other databases, namely, BiosecurID, Visual, Blind, OnOffSigDevanagari 75 and OnOffSigBengali 75 confirm the models generalization capability.