 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Implicit Representation for Highly Dynamic LiDAR Mapping and Odometry
Paper and Code
Sep 26, 2024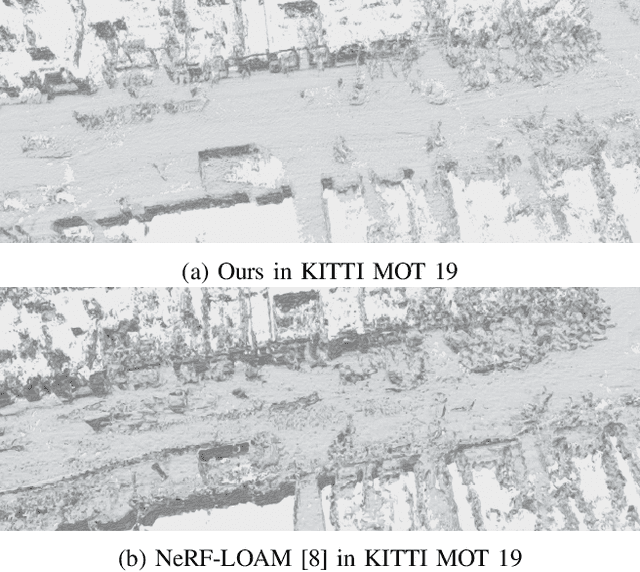
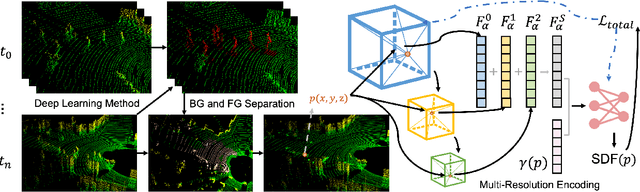
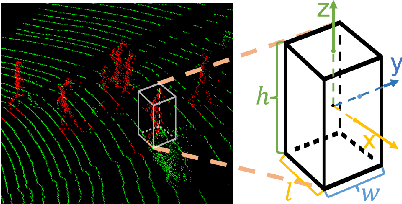
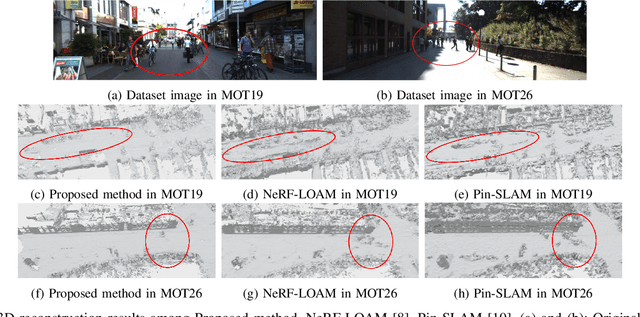
Recent advancements in Simultaneous Localization and Mapping (SLAM) have increasingly highlighted the robustness of LiDAR-based techniques. At the same time, Neural Radiance Fields (NeRF) have introduced new possibilities for 3D scene reconstruction, exemplified by SLAM systems. Among these, NeRF-LOAM has shown notable performance in NeRF-based SLAM applications. However, despite its strengths, these systems often encounter difficulties in dynamic outdoor environments due to their inherent static assumptions. To address these limitations, this paper proposes a novel method designed to improve reconstruction in highly dynamic outdoor scenes. Based on NeRF-LOAM, the proposed approach consists of two primary components. First, we separate the scene into static background and dynamic foreground. By identifying and excluding dynamic elements from the mapping process, this segmentation enables the creation of a dense 3D map that accurately represents the static background only. The second component extends the octree structure to support multi-resolution representation. This extension not only enhances reconstruction quality but also aids in the removal of dynamic objects identified by the first module. Additionally, Fourier feature encoding is applied to the sampled points, capturing high-frequency information and leading to more complete reconstruction results. Evaluations on various datasets demonstrate that our method achieves more competitive results compared to current state-of-the-art approaches.