 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Collision Clearance Estimator for Fast Robot Motion Planning
Paper and Code
Oct 14, 2019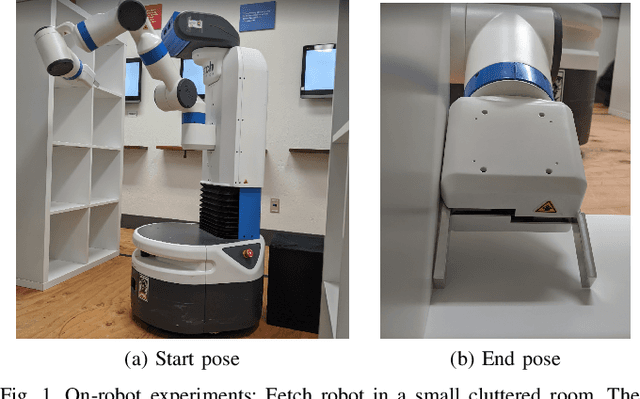
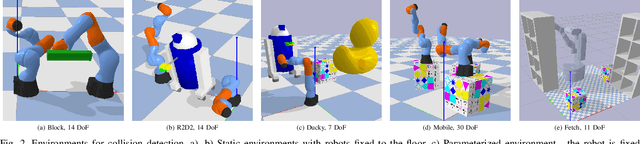
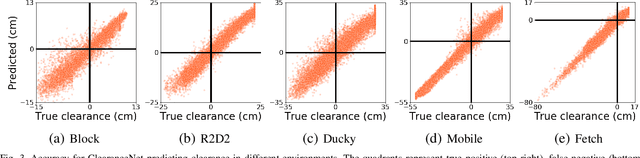
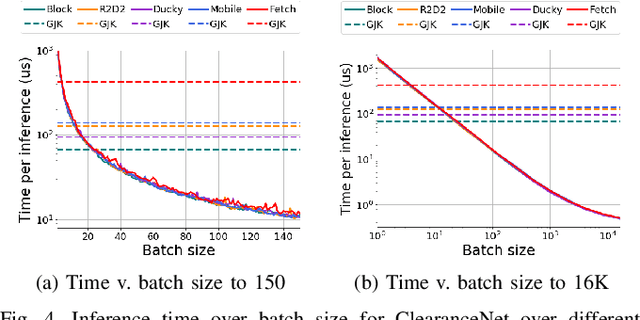
Collision checking is a well known bottleneck in sampling-based motion planning due to its computational expense and the large number of checks required. To alleviate this bottleneck, we present a fast neural network collision checking heuristic, ClearanceNet, and incorporate it within a planning algorithm, ClearanceNet-RRT (CN-RRT). ClearanceNet takes as input a robot pose and the location of all obstacles in the workspace and learns to predict the clearance, i.e., distance to nearest obstacle. CN-RRT then efficiently computes a motion plan by leveraging three key features of ClearanceNet. First, as neural network inference is massively parallel, CN-RRT explores the space via a parallel RRT, which expands nodes in parallel, allowing for thousands of collision checks at once. Second, CN-RRT adaptively relaxes its clearance threshold for more difficult problems. Third, to repair errors, CN-RRT shifts states towards higher clearance through a gradient-based approach that uses the analytic gradient of ClearanceNet. Once a path is found, any errors are repaired via RRT over the misclassified sections, thus maintaining the theoretical guarantees of sampling-based motion planning. We evaluate the collision checking speed, planning speed, and motion plan efficiency in configuration spaces with up to 30 degrees of freedom. The collision checking achieves speedups of more than two orders of magnitude over traditional collision detection methods. Sampling-based planning over multiple robotic arms in new environment configurations achieves speedups of up to 51% over a baseline, with paths up to 25% more efficient. Experiments on a physical Fetch robot reaching into shelves in a cluttered environment confirm the feasibility of this method on real robots.