 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeRO: Neural Road Surface Reconstruction
Paper and Code
May 17, 2024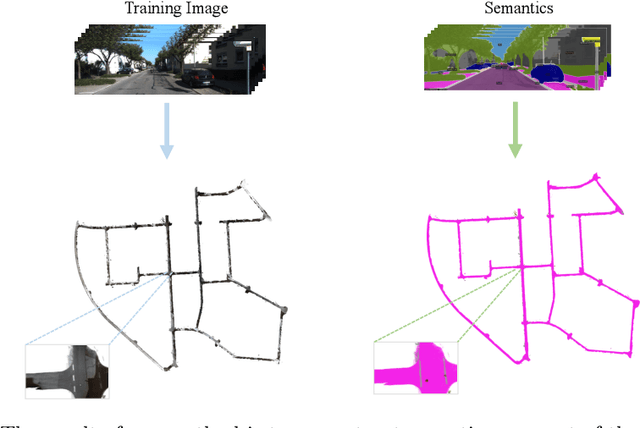
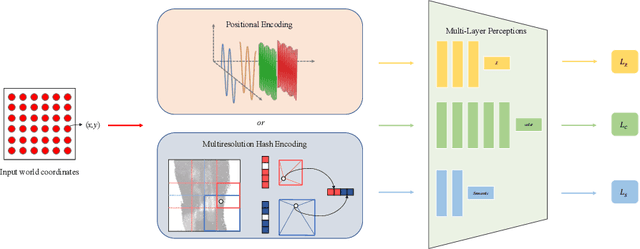
In computer vision and graphics, the accurate reconstruction of road surfaces is pivotal for various applications, especially in autonomous driving. This paper introduces a novel method leveraging the Multi-Layer Perceptrons (MLPs) framework to reconstruct road surfaces in height, color, and semantic information by input world coordinates x and y. Our approach NeRO uses encoding techniques based on MLPs, significantly improving the performance of the complex details, speeding up the training speed, and reducing neural network size. The effectiveness of this method is demonstrated through its superior performance, which indicates a promising direction for rendering road surfaces with semantics applications, particularly in applications demanding visualization of road conditions, 4D labeling, and semantic groupings.