 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNearly Minimax Optimal Regret for Learning Linear Mixture Stochastic Shortest Path
Paper and Code
Feb 14, 2024

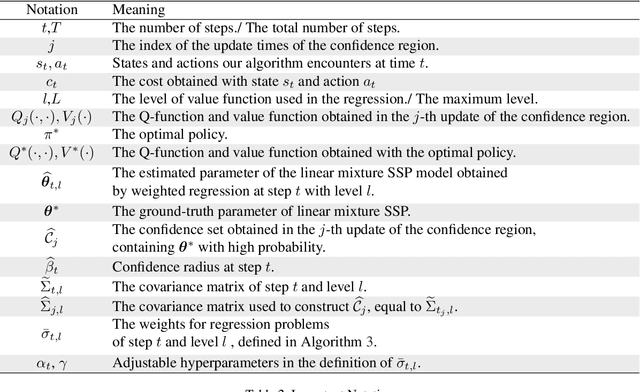
We study the Stochastic Shortest Path (SSP) problem with a linear mixture transition kernel, where an agent repeatedly interacts with a stochastic environment and seeks to reach certain goal state while minimizing the cumulative cost. Existing works often assume a strictly positive lower bound of the cost function or an upper bound of the expected length for the optimal policy. In this paper, we propose a new algorithm to eliminate these restrictive assumptions. Our algorithm is based on extended value iteration with a fine-grained variance-aware confidence set, where the variance is estimated recursively from high-order moments. Our algorithm achieves an $\tilde{\mathcal O}(dB_*\sqrt{K})$ regret bound, where $d$ is the dimension of the feature mapping in the linear transition kernel, $B_*$ is the upper bound of the total cumulative cost for the optimal policy, and $K$ is the number of episodes. Our regret upper bound matches the $\Omega(dB_*\sqrt{K})$ lower bound of linear mixture SSPs in Min et al. (2022), which suggests that our algorithm is nearly minimax optimal.