 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMV-FCOS3D++: Multi-View Camera-Only 4D Object Detection with Pretrained Monocular Backbones
Paper and Code

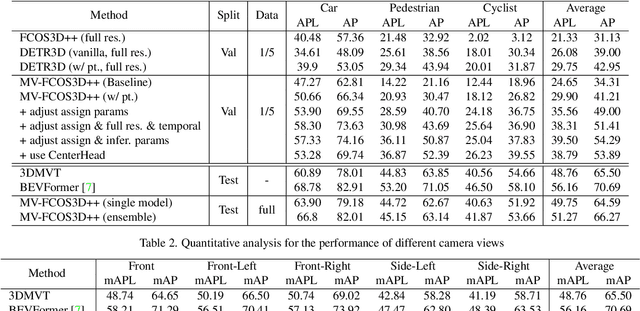


In this technical report, we present our solution, dubbed MV-FCOS3D++, for the Camera-Only 3D Detection track in Waymo Open Dataset Challenge 2022. For multi-view camera-only 3D detection, methods based on bird-eye-view or 3D geometric representations can leverage the stereo cues from overlapped regions between adjacent views and directly perform 3D detection without hand-crafted post-processing. However, it lacks direct semantic supervision for 2D backbones, which can be complemented by pretraining simple monocular-based detectors. Our solution is a multi-view framework for 4D detection following this paradigm. It is built upon a simple monocular detector FCOS3D++, pretrained only with object annotations of Waymo, and converts multi-view features to a 3D grid space to detect 3D objects thereon. A dual-path neck for single-frame understanding and temporal stereo matching is devised to incorporate multi-frame information. Our method finally achieves 49.75% mAPL with a single model and wins 2nd place in the WOD challenge, without any LiDAR-based depth supervision during training. The code will be released at https://github.com/Tai-Wang/Depth-from-Motion.