 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Interaction and Intention Communication for Industrial Robots
Paper and Code
Feb 25, 2025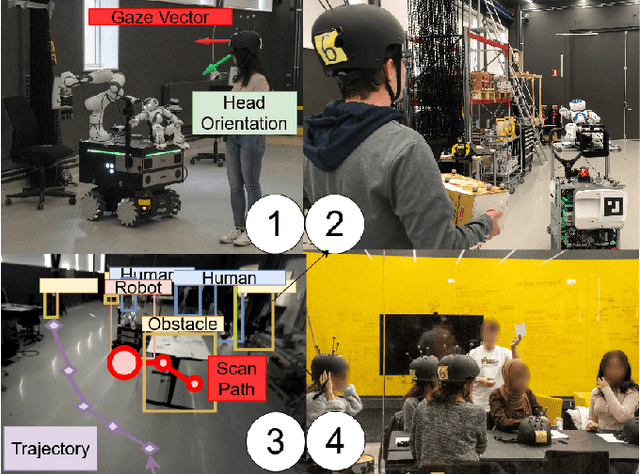
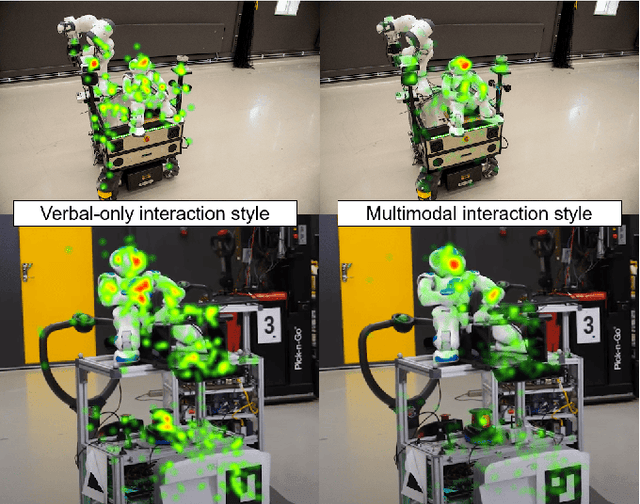
Successful adoption of industrial robots will strongly depend on their ability to safely and efficiently operate in human environments, engage in natural communication, understand their users, and express intentions intuitively while avoiding unnecessary distractions. To achieve this advanced level of Human-Robot Interaction (HRI), robots need to acquire and incorporate knowledge of their users' tasks and environment and adopt multimodal communication approaches with expressive cues that combine speech, movement, gazes, and other modalities. This paper presents several methods to design, enhance, and evaluate expressive HRI systems for non-humanoid industrial robots. We present the concept of a small anthropomorphic robot communicating as a proxy for its non-humanoid host, such as a forklift. We developed a multimodal and LLM-enhanced communication framework for this robot and evaluated it in several lab experiments, using gaze tracking and motion capture to quantify how users perceive the robot and measure the task progress.