 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiagent Rollout and Policy Iteration for POMDP with Application to Multi-Robot Repair Problems
Paper and Code
Nov 09, 2020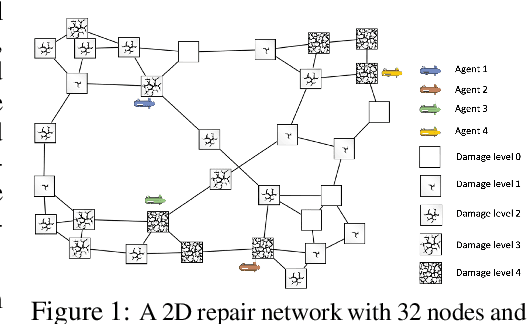
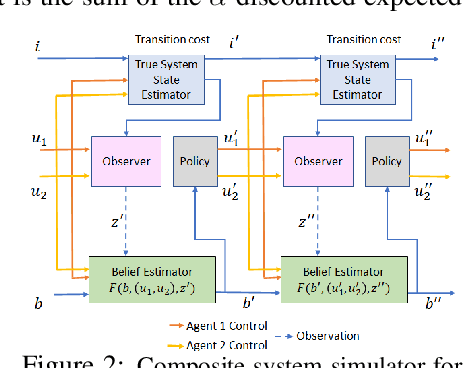

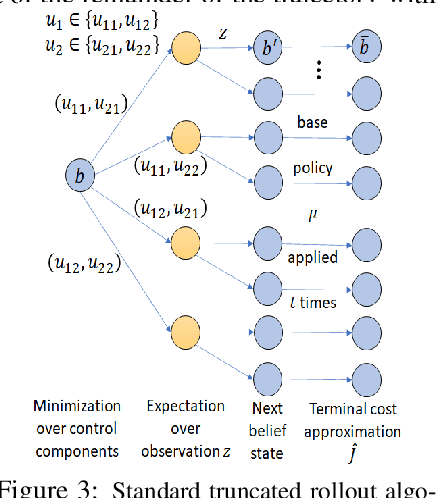
In this paper we consider infinite horizon discounted dynamic programming problems with finite state and control spaces, partial state observations, and a multiagent structure. We discuss and compare algorithms that simultaneously or sequentially optimize the agents' controls by using multistep lookahead, truncated rollout with a known base policy, and a terminal cost function approximation. Our methods specifically address the computational challenges of partially observable multiagent problems. In particular: 1) We consider rollout algorithms that dramatically reduce required computation while preserving the key cost improvement property of the standard rollout method. The per-step computational requirements for our methods are on the order of $O(Cm)$ as compared with $O(C^m)$ for standard rollout, where $C$ is the maximum cardinality of the constraint set for the control component of each agent, and $m$ is the number of agents. 2) We show that our methods can be applied to challenging problems with a graph structure, including a class of robot repair problems whereby multiple robots collaboratively inspect and repair a system under partial information. 3) We provide a simulation study that compares our methods with existing methods, and demonstrate that our methods can handle larger and more complex partially observable multiagent problems (state space size $10^{37}$ and control space size $10^{7}$, respectively). Finally, we incorporate our multiagent rollout algorithms as building blocks in an approximate policy iteration scheme, where successive rollout policies are approximated by using neural network classifiers. While this scheme requires a strictly off-line implementation, it works well in our computational experiments and produces additional significant performance improvement over the single online rollout iteration method.