Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-View Reinforcement Learning
Paper and Code
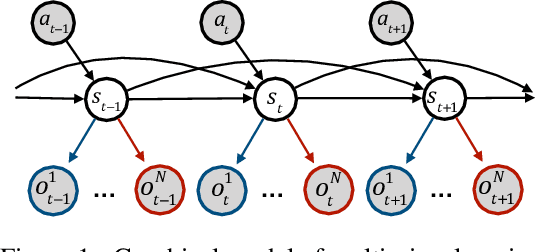

This paper is concerned with multi-view reinforcement learning (MVRL), which allows for decision making when agents share common dynamics but adhere to different observation models. We define the MVRL framework by extending partially observable Markov decision processes (POMDPs) to support more than one observation model and propose two solution methods through observation augmentation and cross-view policy transfer. We empirically evaluate our method and demonstrate its effectiveness in a variety of environments. Specifically, we show reductions in sample complexities and computational time for acquiring policies that handle multi-view environments.
* 33rd Conference on Neural Information Processing Systems (NeurIPS
2019)
View paper on