 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Spectral Image Synthesis for Crop/Weed Segmentation in Precision Farming
Paper and Code
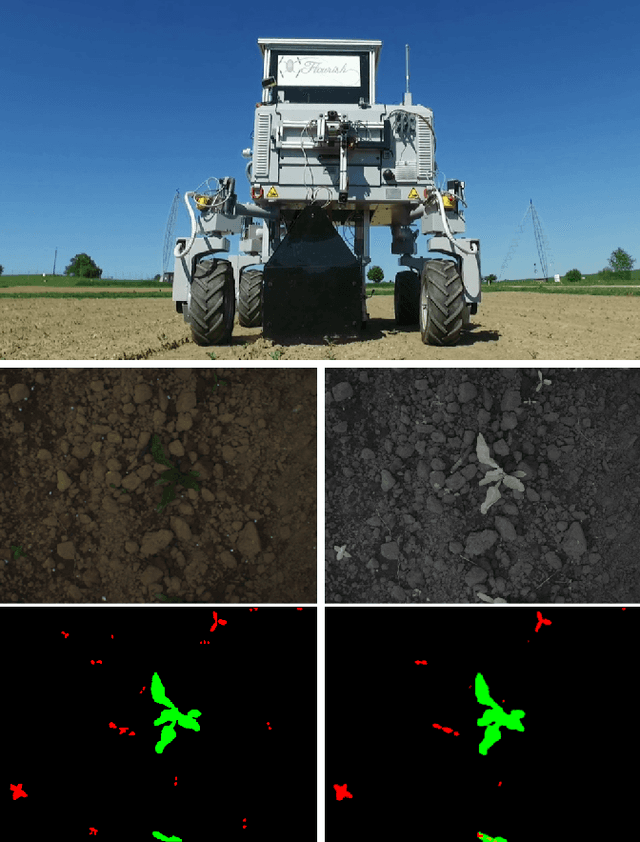
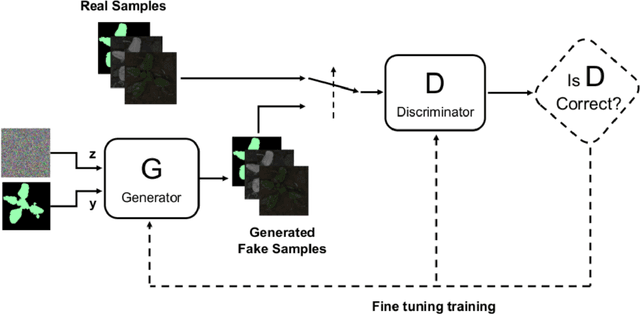
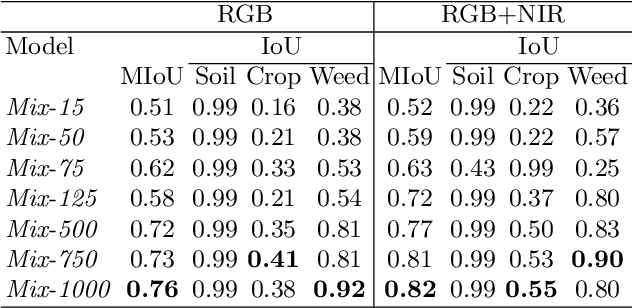
An effective perception system is a fundamental component for farming robots, as it enables them to properly perceive the surrounding environment and to carry out targeted operations. The most recent approaches make use of state-of-the-art machine learning techniques to learn an effective model for the target task. However, those methods need a large amount of labelled data for training. A recent approach to deal with this issue is data augmentation through Generative Adversarial Networks (GANs), where entire synthetic scenes are added to the training data, thus enlarging and diversifying their informative content. In this work, we propose an alternative solution with respect to the common data augmentation techniques, applying it to the fundamental problem of crop/weed segmentation in precision farming. Starting from real images, we create semi-artificial samples by replacing the most relevant object classes (i.e., crop and weeds) with their synthesized counterparts. To do that, we employ a conditional GAN (cGAN), where the generative model is trained by conditioning the shape of the generated object. Moreover, in addition to RGB data, we take into account also near-infrared (NIR) information, generating four channel multi-spectral synthetic images. Quantitative experiments, carried out on three publicly available datasets, show that (i) our model is capable of generating realistic multi-spectral images of plants and (ii) the usage of such synthetic images in the training process improves the segmentation performance of state-of-the-art semantic segmentation Convolutional Networks.