 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-scale Temporal Fusion Transformer for Incomplete Vehicle Trajectory Prediction
Paper and Code
Sep 02, 2024
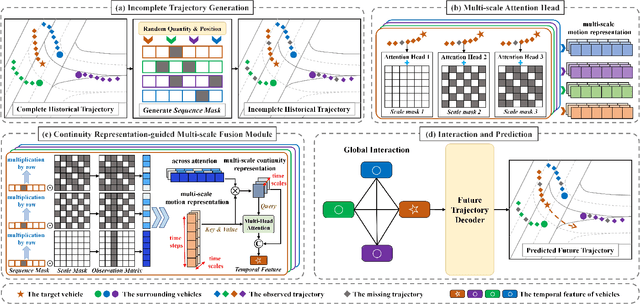

Motion prediction plays an essential role in autonomous driving systems, enabling autonomous vehicles to achieve more accurate local-path planning and driving decisions based on predictions of the surrounding vehicles. However, existing methods neglect the potential missing values caused by object occlusion, perception failures, etc., which inevitably degrades the trajectory prediction performance in real traffic scenarios. To address this limitation, we propose a novel end-to-end framework for incomplete vehicle trajectory prediction, named Multi-scale Temporal Fusion Transformer (MTFT), which consists of the Multi-scale Attention Head (MAH) and the Continuity Representation-guided Multi-scale Fusion (CRMF) module. Specifically, the MAH leverages the multi-head attention mechanism to parallelly capture multi-scale motion representation of trajectory from different temporal granularities, thus mitigating the adverse effect of missing values on prediction. Furthermore, the multi-scale motion representation is input into the CRMF module for multi-scale fusion to obtain the robust temporal feature of the vehicle. During the fusion process, the continuity representation of vehicle motion is first extracted across time steps to guide the fusion, ensuring that the resulting temporal feature incorporates both detailed information and the overall trend of vehicle motion, which facilitates the accurate decoding of future trajectory that is consistent with the vehicle's motion trend. We evaluate the proposed model on four datasets derived from highway and urban traffic scenarios. The experimental results demonstrate its superior performance in the incomplete vehicle trajectory prediction task compared with state-of-the-art models, e.g., a comprehensive performance improvement of more than 39% on the HighD dataset.