 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Path Region Mining For Weakly Supervised 3D Semantic Segmentation on Point Clouds
Paper and Code
Mar 29, 2020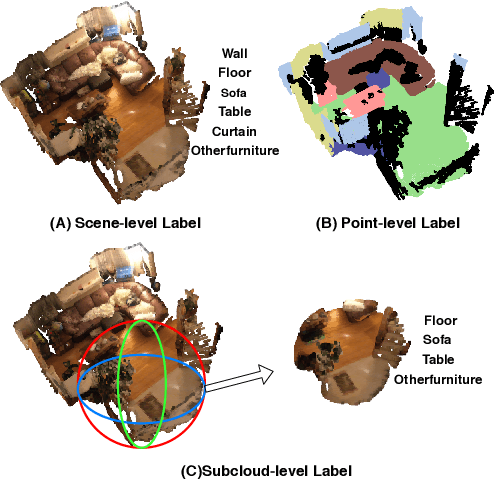
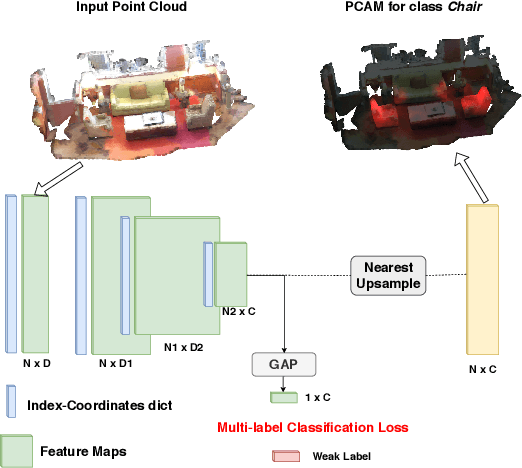
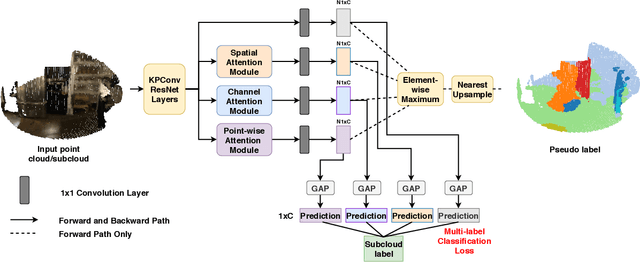
Point clouds provide intrinsic geometric information and surface context for scene understanding. Existing methods for point cloud segmentation require a large amount of fully labeled data. Using advanced depth sensors, collection of large scale 3D dataset is no longer a cumbersome process. However, manually producing point-level label on the large scale dataset is time and labor-intensive. In this paper, we propose a weakly supervised approach to predict point-level results using weak labels on 3D point clouds. We introduce our multi-path region mining module to generate pseudo point-level label from a classification network trained with weak labels. It mines the localization cues for each class from various aspects of the network feature using different attention modules. Then, we use the point-level pseudo labels to train a point cloud segmentation network in a fully supervised manner. To the best of our knowledge, this is the first method that uses cloud-level weak labels on raw 3D space to train a point cloud semantic segmentation network. In our setting, the 3D weak labels only indicate the classes that appeared in our input sample. We discuss both scene- and subcloud-level weakly labels on raw 3D point cloud data and perform in-depth experiments on them. On ScanNet dataset, our result trained with subcloud-level labels is compatible with some fully supervised methods.