Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPGNet: Learning Move-Push-Grasping Synergy for Target-Oriented Grasping in Occluded Scenes
Paper and Code
Aug 20, 2024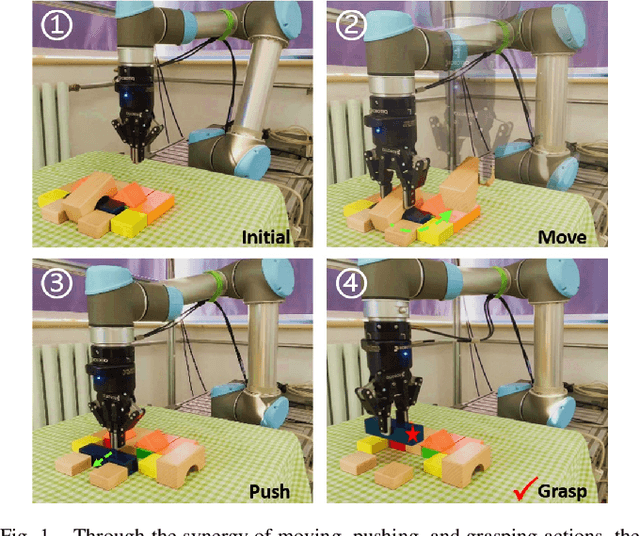
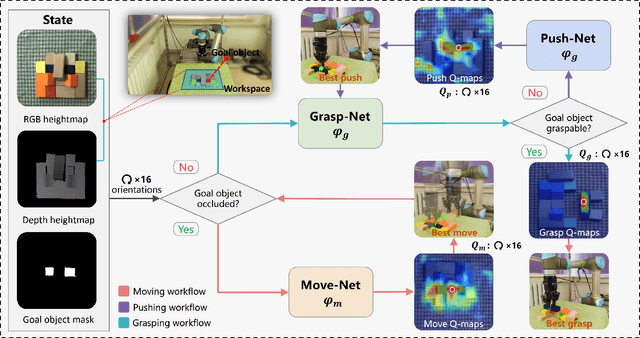
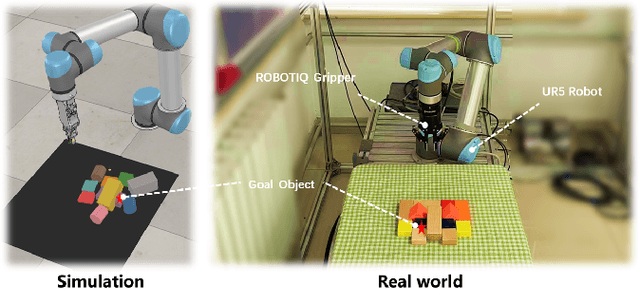
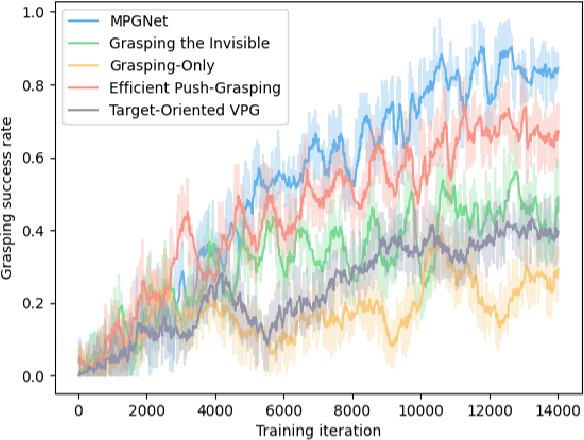
This paper focuses on target-oriented grasping in occluded scenes, where the target object is specified by a binary mask and the goal is to grasp the target object with as few robotic manipulations as possible. Most existing methods rely on a push-grasping synergy to complete this task. To deliver a more powerful target-oriented grasping pipeline, we present MPGNet, a three-branch network for learning a synergy between moving, pushing, and grasping actions. We also propose a multi-stage training strategy to train the MPGNet which contains three policy networks corresponding to the three actions. The effectiveness of our method is demonstrated via both simulated and real-world experiments.
* Accepted to IROS 2024
View paper on