 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Imitation Based on Sparsely Sampled Correspondence
Paper and Code
Jul 25, 2016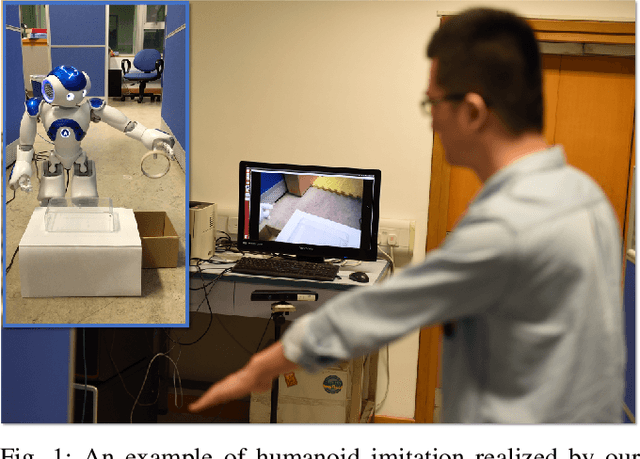
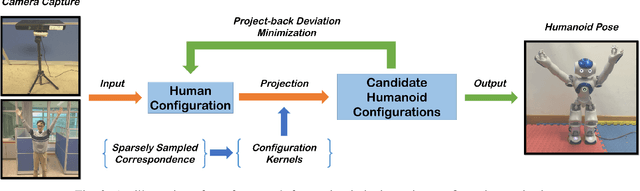
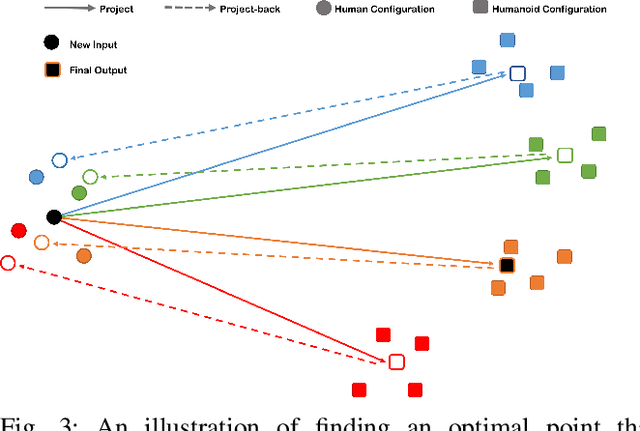
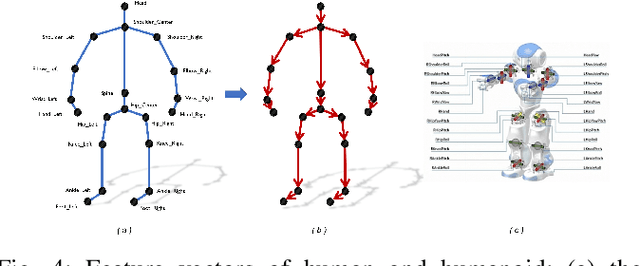
Existing techniques for motion imitation often suffer a certain level of latency due to their computational overhead or a large set of correspondence samples to search. To achieve real-time imitation with small latency, we present a framework in this paper to reconstruct motion on humanoids based on sparsely sampled correspondence. The imitation problem is formulated as finding the projection of a point from the configuration space of a human's poses into the configuration space of a humanoid. An optimal projection is defined as the one that minimizes a back-projected deviation among a group of candidates, which can be determined in a very efficient way. Benefited from this formulation, effective projections can be obtained by using sparse correspondence. Methods for generating these sparse correspondence samples have also been introduced. Our method is evaluated by applying the human's motion captured by a RGB-D sensor to a humanoid in real-time. Continuous motion can be realized and used in the example application of tele-operation.