 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoral-Trust Violation vs Performance-Trust Violation by a Robot: Which Hurts More?
Paper and Code
Oct 09, 2021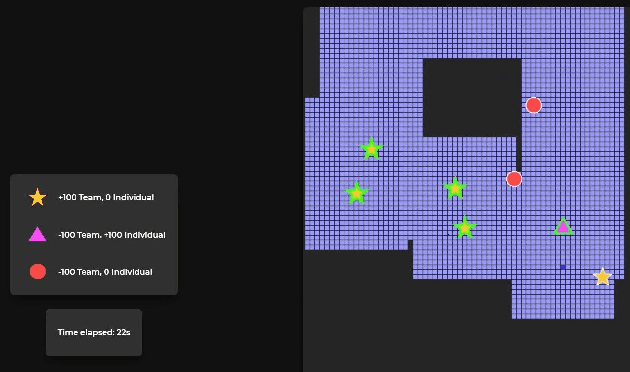
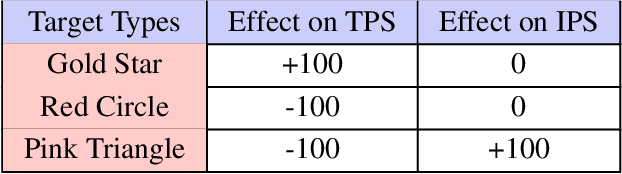
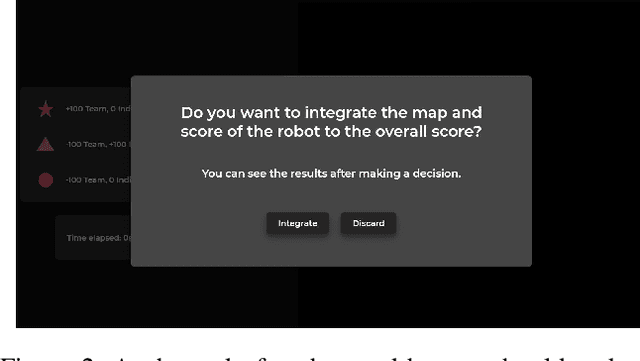
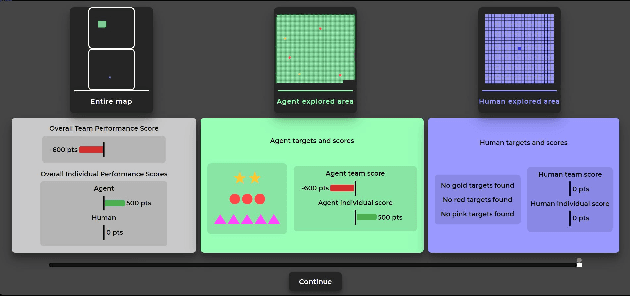
In recent years a modern conceptualization of trust in human-robot interaction (HRI) was introduced by Ullman et al.\cite{ullman2018does}. This new conceptualization of trust suggested that trust between humans and robots is multidimensional, incorporating both performance aspects (i.e., similar to the trust in human-automation interaction) and moral aspects (i.e., similar to the trust in human-human interaction). But how does a robot violating each of these different aspects of trust affect human trust in a robot? How does trust in robots change when a robot commits a moral-trust violation compared to a performance-trust violation? And whether physiological signals have the potential to be used for assessing gain/loss of each of these two trust aspects in a human. We aim to design an experiment to study the effects of performance-trust violation and moral-trust violation separately in a search and rescue task. We want to see whether two failures of a robot with equal magnitudes would affect human trust differently if one failure is due to a performance-trust violation and the other is a moral-trust violation.