 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModule-Wise Network Quantization for 6D Object Pose Estimation
Paper and Code
Mar 12, 2023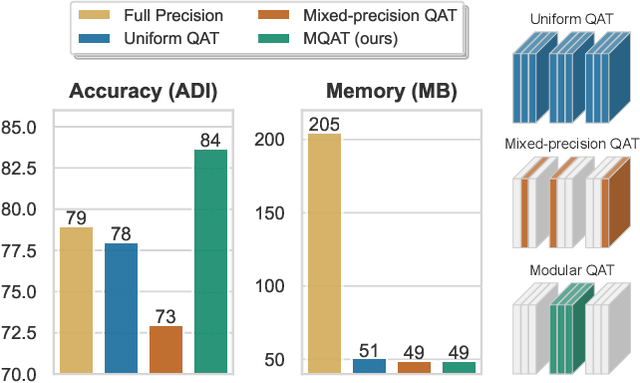
Many edge applications, such as collaborative robotics and spacecraft rendezvous, can benefit from 6D object pose estimation, but must do so on embedded platforms. Unfortunately, existing 6D pose estimation networks are typically too large for deployment in such situations and must therefore be compressed, while maintaining reliable performance. In this work, we present an approach to doing so by quantizing such networks. More precisely, we introduce a module-wise quantization strategy that, in contrast to uniform and mixed-precision quantization, accounts for the modular structure of typical 6D pose estimation frameworks. We demonstrate that uniquely compressing these modules outperforms uniform and mixed-precision quantization techniques. Moreover, our experiments evidence that module-wise quantization can lead to a significant accuracy boost. We showcase the generality of our approach using different datasets, quantization methodologies, and network architectures, including the recent ZebraPose.