 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Collaboration for Robot-assisted Dressing Tasks
Paper and Code
Sep 14, 2019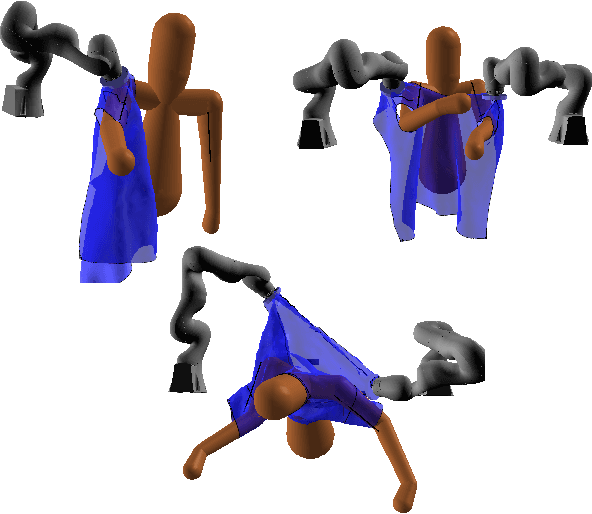
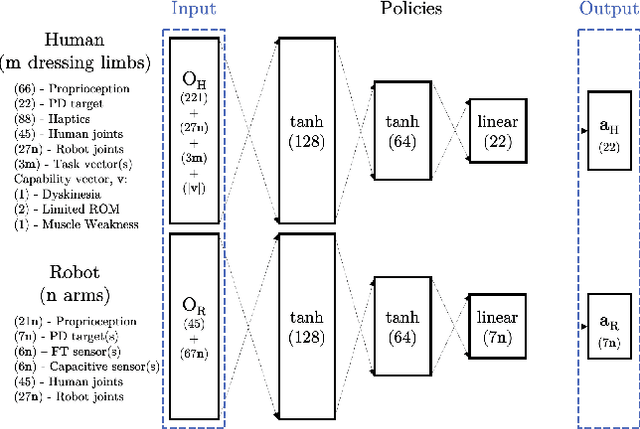
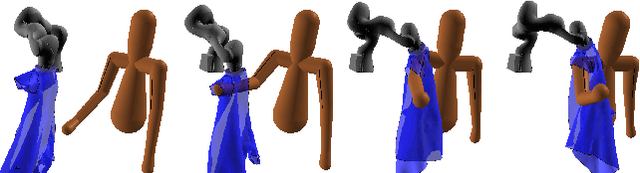
We investigated the application of haptic aware feedback control and deep reinforcement learning to robot assisted dressing in simulation. We did so by modeling both human and robot control policies as separate neural networks and training them both via TRPO. We show that co-optimization, training separate human and robot control policies simultaneously, can be a valid approach to finding successful strategies for human/robot cooperation on assisted dressing tasks. Typical tasks are putting on one or both sleeves of a hospital gown or pulling on a T-shirt. We also present a method for modeling human dressing behavior under variations in capability including: unilateral muscle weakness, Dyskinesia, and limited range of motion. Using this method and behavior model, we demonstrate discovery of successful strategies for a robot to assist humans with a variety of capability limitations.