 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Control for Autonomous Driving considering Actuator Dynamics
Paper and Code
Oct 12, 2018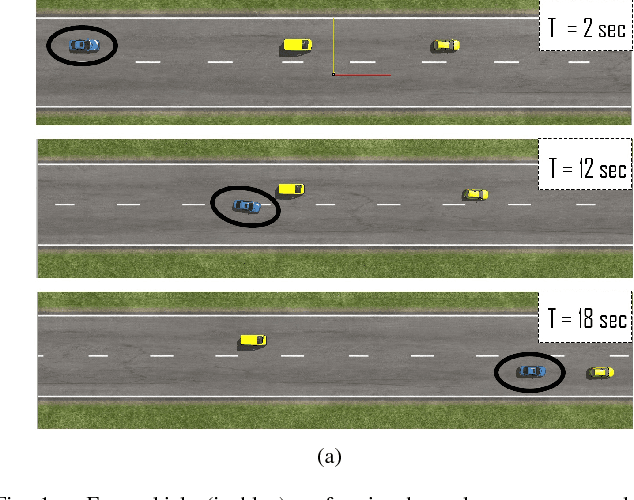
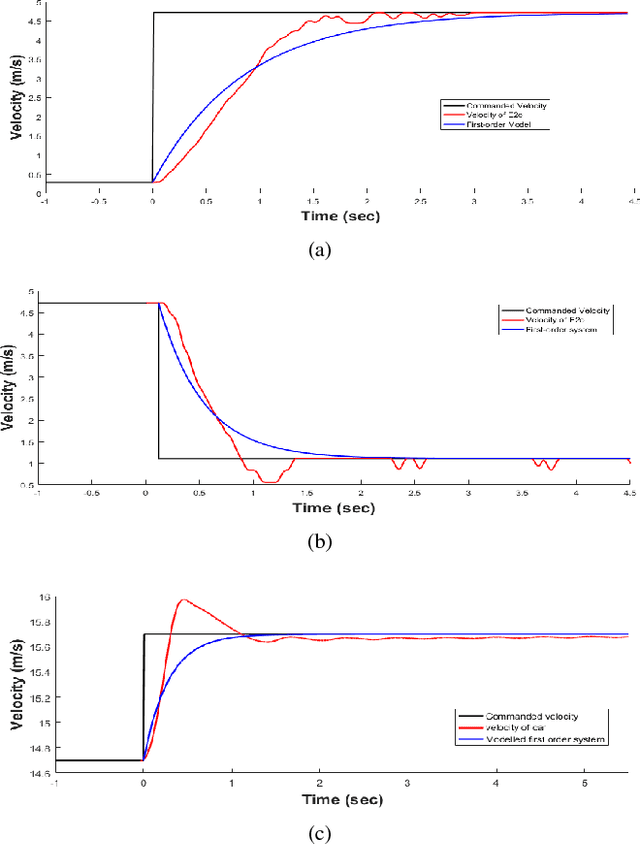
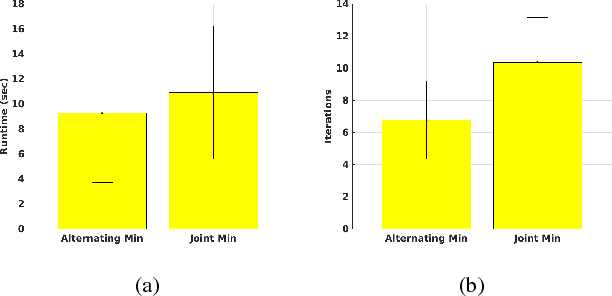
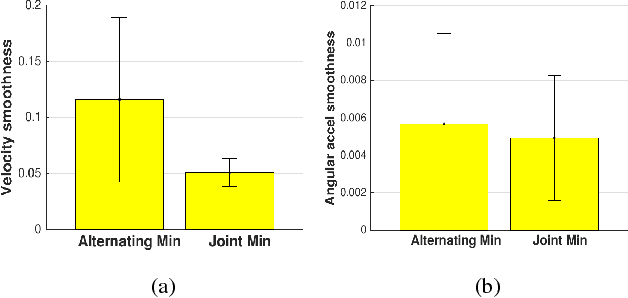
In this paper, we propose a new model predictive control (MPC) formulation for autonomous driving. The novelty of our MPC stems from the following results. Firstly, we adopt an alternating minimization approach wherein linear velocities and angular accelerations are alternately optimized. We show that in contrast to the joint optimization, the alternating minimization exploits the structure of the problem better, which in turn translates to reduction in computation time. Secondly, our MPC explicitly incorporates the time dependent non-linear actuator dynamics that captures the transient response of the vehicle for a given commanded velocity. This added complexity improves the predictive component of MPC resulting in improved margin of inter-vehicle distance during maneuvers like overtaking, lane-change, etc. Although, past works have also incorporated actuator dynamics within MPC, there has been very few attempts towards coupling actuator dynamics to collision avoidance constraints through the non-holonomic motion model of the vehicle and analyzing the resulting behavior. We use a high fidelity simulator to benchmark our actuator dynamics augmented MPC with other related approaches in terms of metrics like inter-vehicle distance, trajectory smoothness, and velocity overshoot.