 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-based Catheter Segmentation in MRI-images
Paper and Code
May 18, 2017
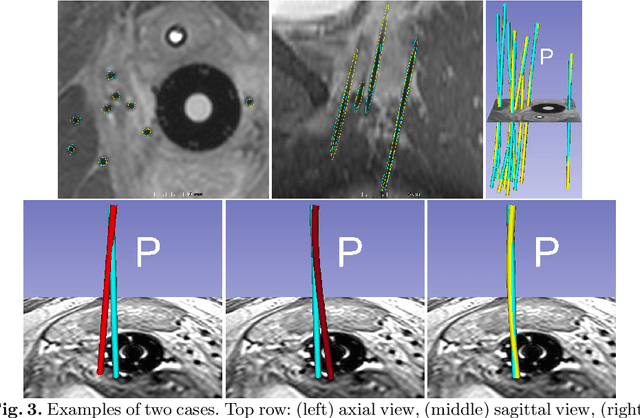

Accurate and reliable segmentation of catheters in MR-gui- ded interventions remains a challenge, and a step of critical importance in clinical workflows. In this work, under reasonable assumptions, me- chanical model based heuristics guide the segmentation process allows correct catheter identification rates greater than 98% (error 2.88 mm), and reduction in outliers to one-fourth compared to the state of the art. Given distal tips, searching towards the proximal ends of the catheters is guided by mechanical models that are estimated on a per-catheter basis. Their bending characteristics are used to constrain the image fea- ture based candidate points. The final catheter trajectories are hybrid sequences of individual points, each derived from model and image fea- tures. We evaluate the method on a database of 10 patient MRI scans including 101 manually segmented catheters. The mean errors were 1.40 mm and the median errors were 1.05 mm. The number of outliers devi- ating more than 2 mm from the gold standard is 7, and the number of outliers deviating more than 3 mm from the gold standard is just 2.