 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeSLAM: Memory Efficient SLAM based on Neural Fields
Paper and Code
Sep 19, 2022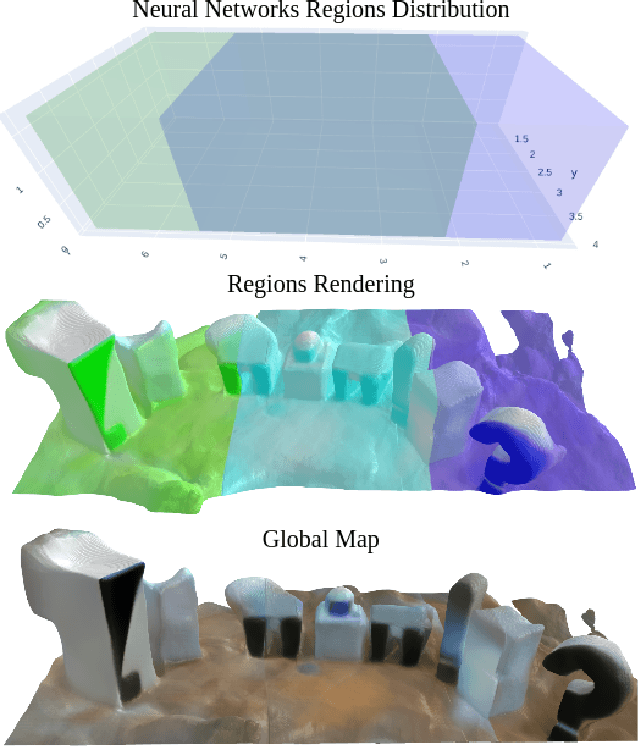
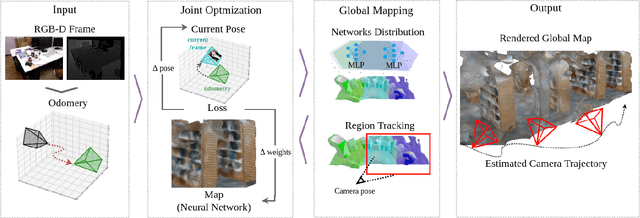
Existing Simultaneous Localization and Mapping (SLAM) approaches are limited in their scalability due to growing map size in long-term robot operation. Moreover, processing such maps for localization and planning tasks leads to the increased computational resources required onboard. To address the problem of memory consumption in long-term operation, we develop a novel real-time SLAM algorithm, MeSLAM, that is based on neural field implicit map representation. It combines the proposed global mapping strategy, including neural networks distribution and region tracking, with an external odometry system. As a result, the algorithm is able to efficiently train multiple networks representing different map regions and track poses accurately in large-scale environments. Experimental results show that the accuracy of the proposed approach is comparable to the state-of-the-art methods (on average, 6.6 cm on TUM RGB-D sequences) and outperforms the baseline, iMAP$^*$. Moreover, the proposed SLAM approach provides the most compact-sized maps without details distortion (1.9 MB to store 57 m$^3$) among the state-of-the-art SLAM approaches.