 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMerging Classification Predictions with Sequential Information for Lightweight Visual Place Recognition in Changing Environments
Paper and Code
Oct 03, 2022
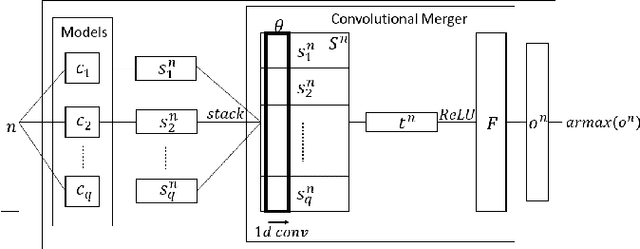

Low-overhead visual place recognition (VPR) is a highly active research topic. Mobile robotics applications often operate under low-end hardware, and even more hardware capable systems can still benefit from freeing up onboard system resources for other navigation tasks. This work addresses lightweight VPR by proposing a novel system based on the combination of binary-weighted classifier networks with a one-dimensional convolutional network, dubbed merger. Recent work in fusing multiple VPR techniques has mainly focused on increasing VPR performance, with computational efficiency not being highly prioritized. In contrast, we design our technique prioritizing low inference times, taking inspiration from the machine learning literature where the efficient combination of classifiers is a heavily researched topic. Our experiments show that the merger achieves inference times as low as 1 millisecond, being significantly faster than other well-established lightweight VPR techniques, while achieving comparable or superior VPR performance on several visual changes such as seasonal variations and viewpoint lateral shifts.