 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximizing Information Gain in Partially Observable Environments via Prediction Reward
Paper and Code
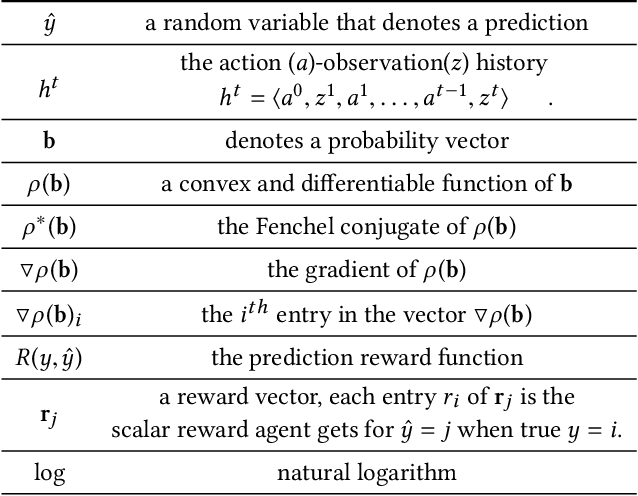
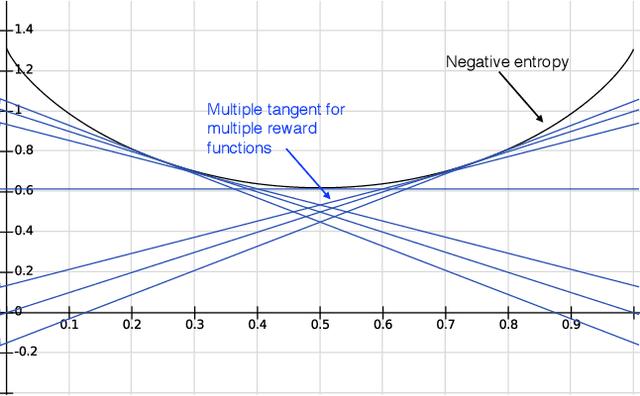
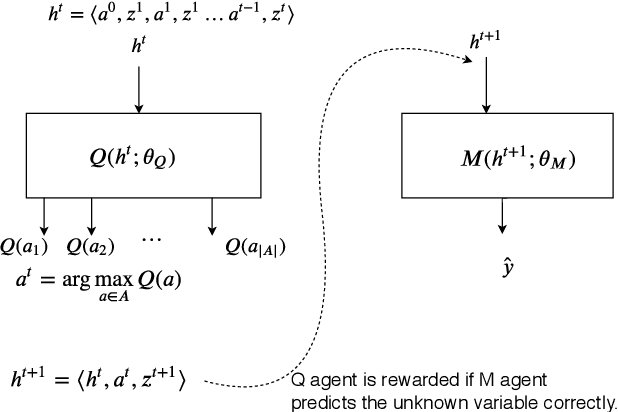
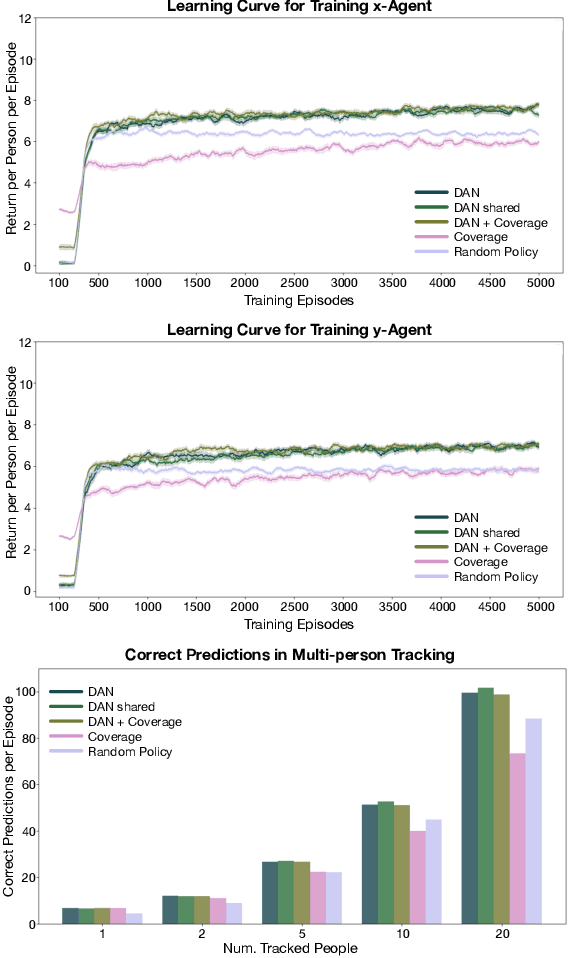
Information gathering in a partially observable environment can be formulated as a reinforcement learning (RL), problem where the reward depends on the agent's uncertainty. For example, the reward can be the negative entropy of the agent's belief over an unknown (or hidden) variable. Typically, the rewards of an RL agent are defined as a function of the state-action pairs and not as a function of the belief of the agent; this hinders the direct application of deep RL methods for such tasks. This paper tackles the challenge of using belief-based rewards for a deep RL agent, by offering a simple insight that maximizing any convex function of the belief of the agent can be approximated by instead maximizing a prediction reward: a reward based on prediction accuracy. In particular, we derive the exact error between negative entropy and the expected prediction reward. This insight provides theoretical motivation for several fields using prediction rewards---namely visual attention, question answering systems, and intrinsic motivation---and highlights their connection to the usually distinct fields of active perception, active sensing, and sensor placement. Based on this insight we present deep anticipatory networks (DANs), which enables an agent to take actions to reduce its uncertainty without performing explicit belief inference. We present two applications of DANs: building a sensor selection system for tracking people in a shopping mall and learning discrete models of attention on fashion MNIST and MNIST digit classification.