 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximising Coefficiency of Human-Robot Handovers through Reinforcement Learning
Paper and Code
Jun 12, 2023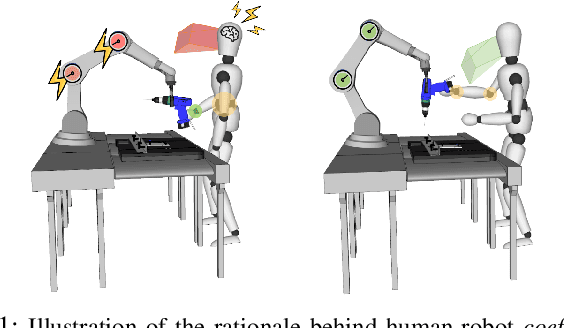

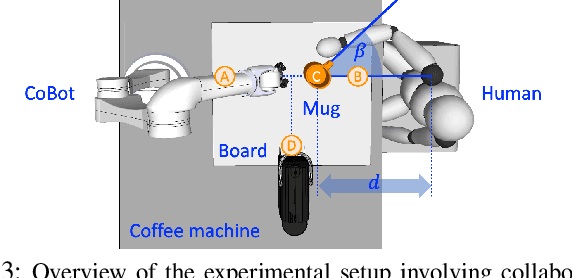
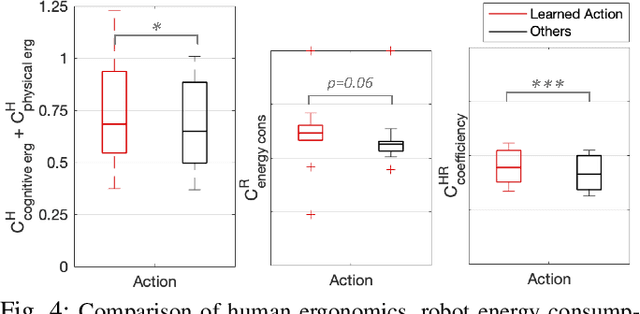
Handing objects to humans is an essential capability for collaborative robots. Previous research works on human-robot handovers focus on facilitating the performance of the human partner and possibly minimising the physical effort needed to grasp the object. However, altruistic robot behaviours may result in protracted and awkward robot motions, contributing to unpleasant sensations by the human partner and affecting perceived safety and social acceptance. This paper investigates whether transferring the cognitive science principle that "humans act coefficiently as a group" (i.e. simultaneously maximising the benefits of all agents involved) to human-robot cooperative tasks promotes a more seamless and natural interaction. Human-robot coefficiency is first modelled by identifying implicit indicators of human comfort and discomfort as well as calculating the robot energy consumption in performing the desired trajectory. We then present a reinforcement learning approach that uses the human-robot coefficiency score as reward to adapt and learn online the combination of robot interaction parameters that maximises such coefficiency. Results proved that by acting coefficiently the robot could meet the individual preferences of most subjects involved in the experiments, improve the human perceived comfort, and foster trust in the robotic partner.