Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping Navigation Instructions to Continuous Control Actions with Position-Visitation Prediction
Paper and Code
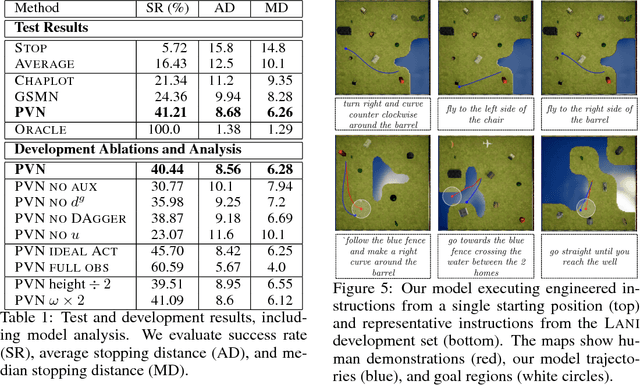
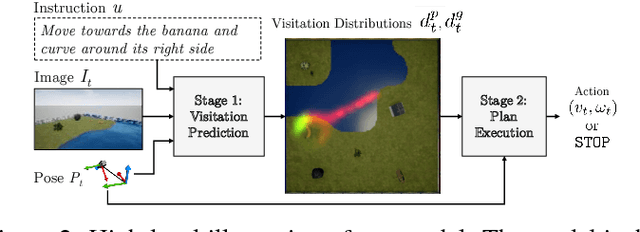
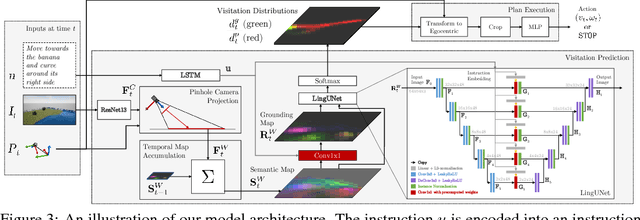

We propose an approach for mapping natural language instructions and raw observations to continuous control of a quadcopter drone. Our model predicts interpretable position-visitation distributions indicating where the agent should go during execution and where it should stop, and uses the predicted distributions to select the actions to execute. This two-step model decomposition allows for simple and efficient training using a combination of supervised learning and imitation learning. We evaluate our approach with a realistic drone simulator, and demonstrate absolute task-completion accuracy improvements of 16.85% over two state-of-the-art instruction-following methods.
* In Conference on Robot Learning (pp. 505-518) (2018) * Appeared in Conference on Robot Learning 2018
View paper on