 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManeuver-based Trajectory Prediction for Self-driving Cars Using Spatio-temporal Convolutional Networks
Paper and Code
Sep 15, 2021

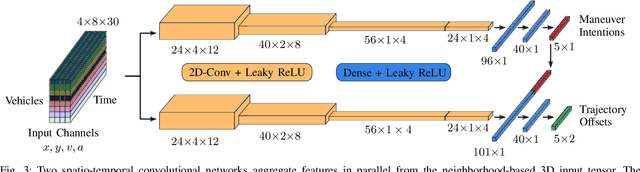

The ability to predict the future movements of other vehicles is a subconscious and effortless skill for humans and key to safe autonomous driving. Therefore, trajectory prediction for autonomous cars has gained a lot of attention in recent years. It is, however, still a hard task to achieve human-level performance. Interdependencies between vehicle behaviors and the multimodal nature of future intentions in a dynamic and complex driving environment render trajectory prediction a challenging problem. In this work, we propose a new, data-driven approach for predicting the motion of vehicles in a road environment. The model allows for inferring future intentions from the past interaction among vehicles in highway driving scenarios. Using our neighborhood-based data representation, the proposed system jointly exploits correlations in the spatial and temporal domain using convolutional neural networks. Our system considers multiple possible maneuver intentions and their corresponding motion and predicts the trajectory for five seconds into the future. We implemented our approach and evaluated it on two highway datasets taken in different countries and are able to achieve a competitive prediction performance.