 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaAST: Map Attention with Semantic Transformersfor Efficient Visual Navigation
Paper and Code
Mar 21, 2021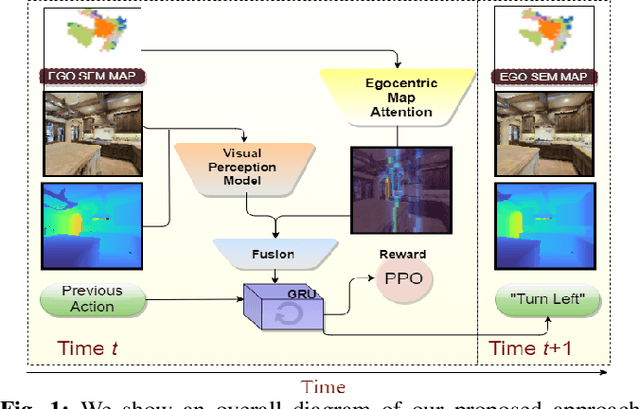
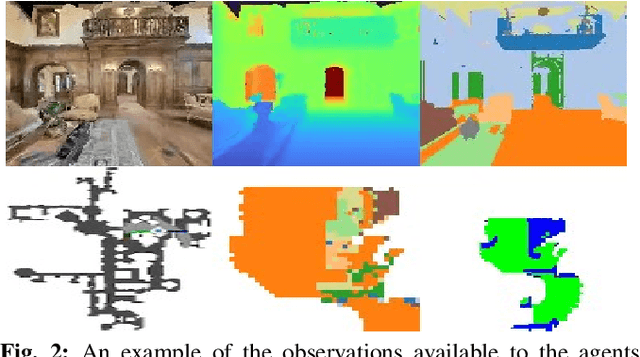
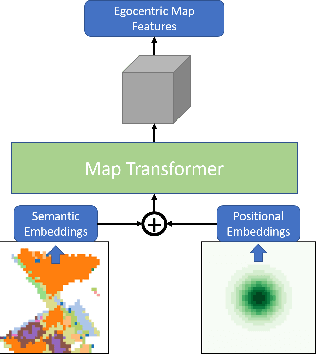
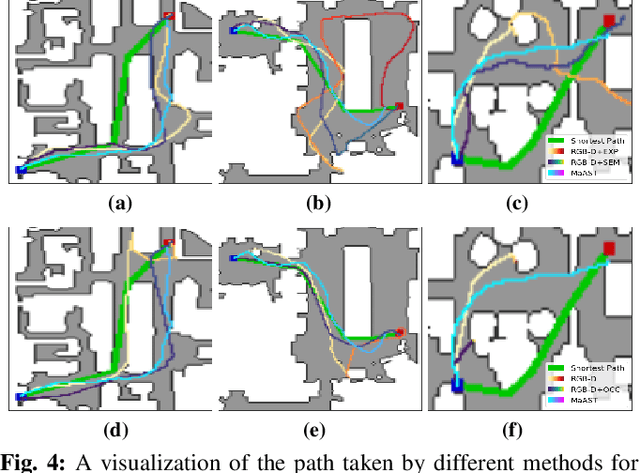
Visual navigation for autonomous agents is a core task in the fields of computer vision and robotics. Learning-based methods, such as deep reinforcement learning, have the potential to outperform the classical solutions developed for this task; however, they come at a significantly increased computational load. Through this work, we design a novel approach that focuses on performing better or comparable to the existing learning-based solutions but under a clear time/computational budget. To this end, we propose a method to encode vital scene semantics such as traversable paths, unexplored areas, and observed scene objects -- alongside raw visual streams such as RGB, depth, and semantic segmentation masks -- into a semantically informed, top-down egocentric map representation. Further, to enable the effective use of this information, we introduce a novel 2-D map attention mechanism, based on the successful multi-layer Transformer networks. We conduct experiments on 3-D reconstructed indoor PointGoal visual navigation and demonstrate the effectiveness of our approach. We show that by using our novel attention schema and auxiliary rewards to better utilize scene semantics, we outperform multiple baselines trained with only raw inputs or implicit semantic information while operating with an 80% decrease in the agent's experience.