 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLVD-NMPC: A Learning-based Vision Dynamics Approach to Nonlinear Model Predictive Control for Autonomous Vehicles
Paper and Code
May 27, 2021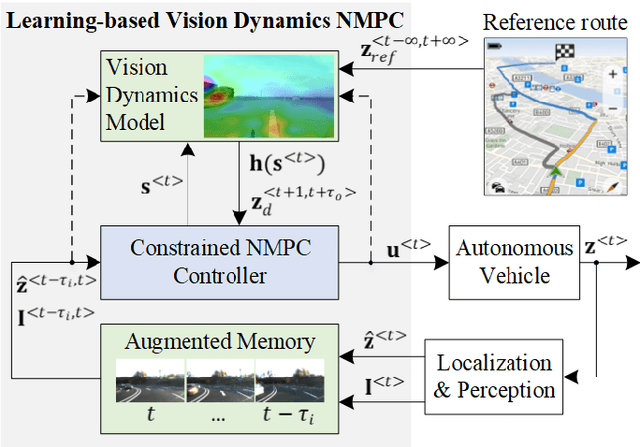
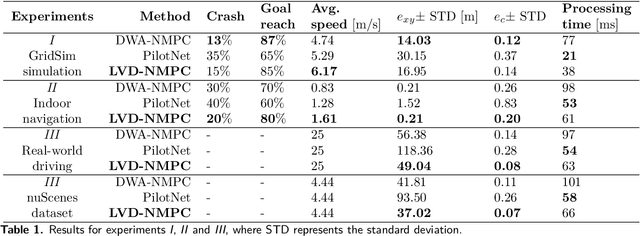
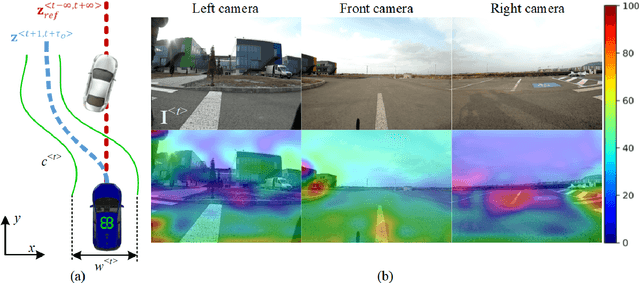
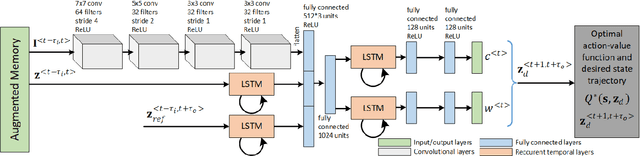
In this paper, we introduce a learning-based vision dynamics approach to nonlinear model predictive control for autonomous vehicles, coined LVD-NMPC. LVD-NMPC uses an a-priori process model and a learned vision dynamics model used to calculate the dynamics of the driving scene, the controlled system's desired state trajectory and the weighting gains of the quadratic cost function optimized by a constrained predictive controller. The vision system is defined as a deep neural network designed to estimate the dynamics of the images scene. The input is based on historic sequences of sensory observations and vehicle states, integrated by an Augmented Memory component. Deep Q-Learning is used to train the deep network, which once trained can be used to also calculate the desired trajectory of the vehicle. We evaluate LVD-NMPC against a baseline Dynamic Window Approach (DWA) path planning executed using standard NMPC, as well as against the PilotNet neural network. Performance is measured in our simulation environment GridSim, on a real-world 1:8 scaled model car, as well as on a real size autonomous test vehicle and the nuScenes computer vision dataset.