 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLook Both Ways: Bidirectional Visual Sensing for Automatic Multi-Camera Registration
Paper and Code
Aug 15, 2022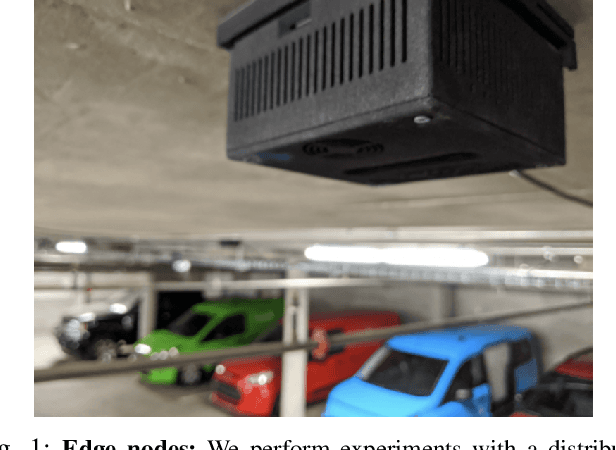
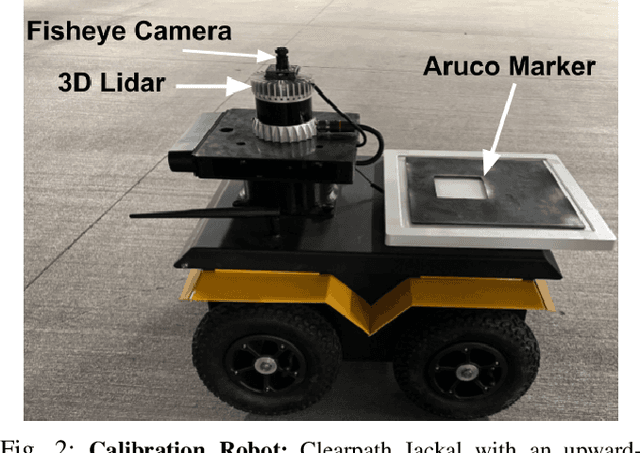
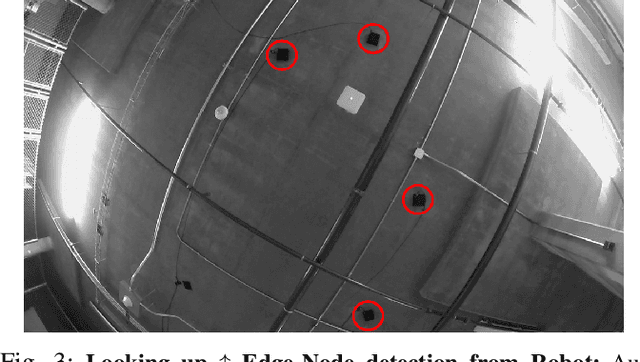
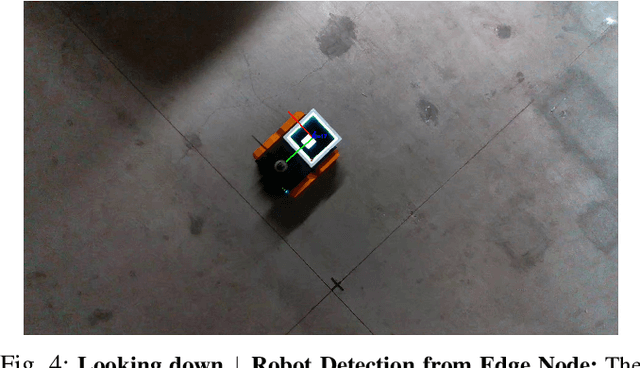
This work describes the automatic registration of a large network (approximately 40) of fixed, ceiling-mounted environment cameras spread over a large area (approximately 800 squared meters) using a mobile calibration robot equipped with a single upward-facing fisheye camera and a backlit ArUco marker for easy detection. The fisheye camera is used to do visual odometry (VO), and the ArUco marker facilitates easy detection of the calibration robot in the environment cameras. In addition, the fisheye camera is also able to detect the environment cameras. This two-way, bidirectional detection constrains the pose of the environment cameras to solve an optimization problem. Such an approach can be used to automatically register a large-scale multi-camera system used for surveillance, automated parking, or robotic applications. This VO based multicamera registration method is extensively validated using real-world experiments, and also compared against a similar approach which uses an LiDAR - an expensive, heavier and power hungry sensor.