 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong Term Motion Prediction Using Keyposes
Paper and Code
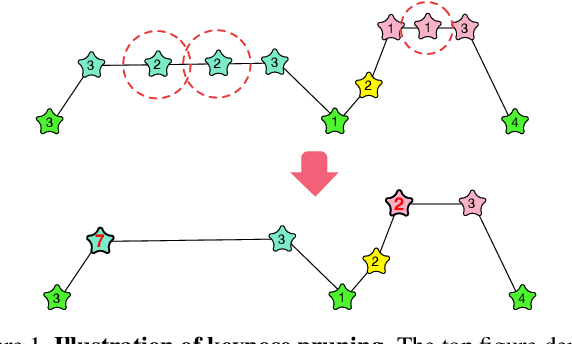
Long term human motion prediction is an essential component in safety-critical applications, such as human-robot interaction and autonomous driving. We argue that, to achieve long term forecasting, predicting human pose at every time instant is unnecessary because human motion follows patterns that are well-represented by a few essential poses in the sequence. We call such poses "keyposes", and approximate complex motions by linearly interpolating between subsequent keyposes. We show that learning the sequence of such keyposes allows us to predict very long term motion, up to 5 seconds in the future. In particular, our predictions are much more realistic and better preserve the motion dynamics than those obtained by the state-of-the-art methods. Furthermore, our approach models the future keyposes probabilistically, which, during inference, lets us generate diverse future motions via sampling.