 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong Range Stereo Matching by Learning Depth and Disparity
Paper and Code
Sep 10, 2020
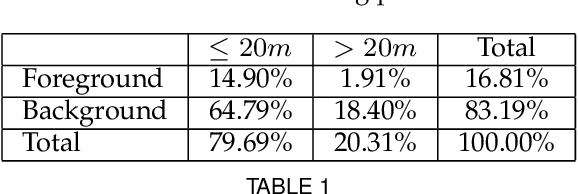
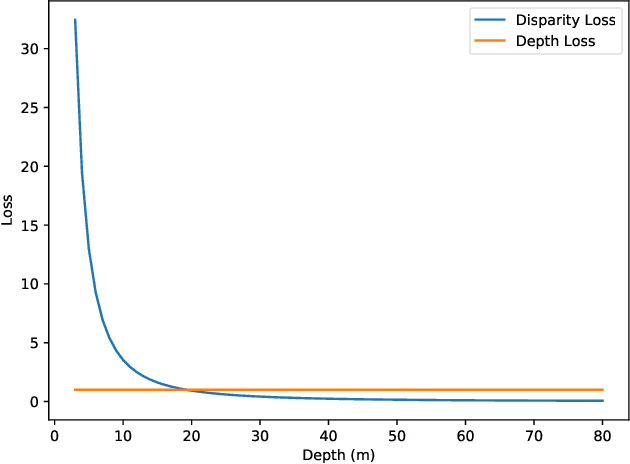
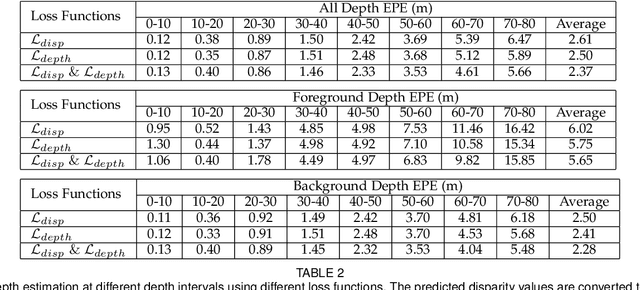
Stereo matching generally involves computation of pixel correspondences and estimation of disparities between rectified image pairs. In many applications including simultaneous localization and mapping (SLAM) and 3D object detection, disparity is particularly needed to calculate depth values. While many recent stereo matching solutions focus on delivering a neural network model that provides better matching and aggregation, little attention has been given to the problems of having bias in training data or selected loss function. As the performance of supervised learning networks largely depends on the properties of training data and its loss function, we will show that by simply allowing the neural network to be aware of a bias, its performance improves. We also demonstrate the existence of bias in both the popular KITTI 2015 stereo dataset and the commonly used smooth L1 loss function. Our solution has two components: The loss is depth-based and has two different parts for foreground and background pixels. The combination of those allows the stereo matching network to evenly focus on all pixels and mitigate the potential of over-fitting caused by the bias. The efficacy of our approach is demonstrated by an extensive set of experiments and benchmarking those against the state-of-the-art results. In particular, our results show that the proposed loss function is very effective for the estimation of depth and disparity for objects at distances beyond 50 meters, which represents the frontier for the emerging applications of the passive vision in building autonomous navigation systems.