 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogistic $Q$-Learning
Paper and Code
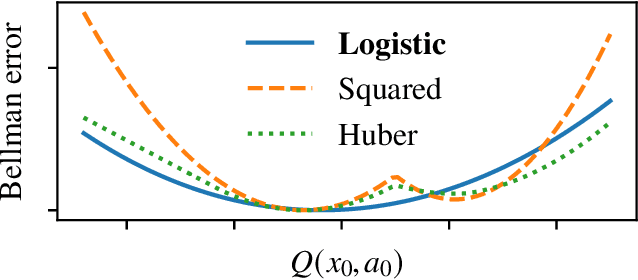
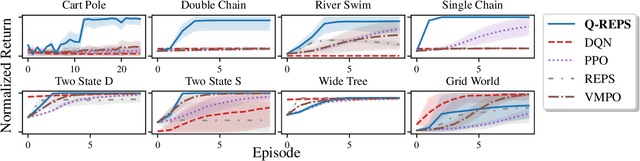
We propose a new reinforcement learning algorithm derived from a regularized linear-programming formulation of optimal control in MDPs. The method is closely related to the classic Relative Entropy Policy Search (REPS) algorithm of Peters et al. (2010), with the key difference that our method introduces a Q-function that enables efficient exact model-free implementation. The main feature of our algorithm (called QREPS) is a convex loss function for policy evaluation that serves as a theoretically sound alternative to the widely used squared Bellman error. We provide a practical saddle-point optimization method for minimizing this loss function and provide an error-propagation analysis that relates the quality of the individual updates to the performance of the output policy. Finally, we demonstrate the effectiveness of our method on a range of benchmark problems.