 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidar Measurement Bias Estimation via Return Waveform Modelling in a Context of 3D Mapping
Paper and Code
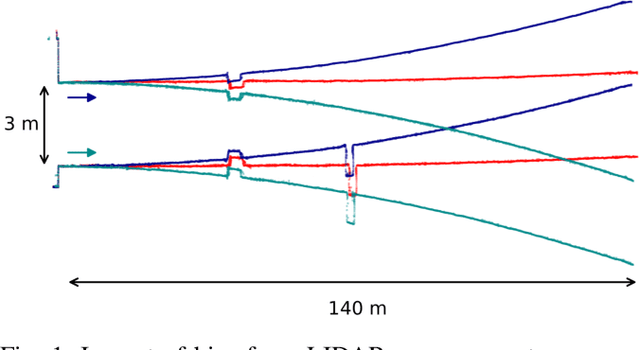
In a context of 3D mapping, it is very important to get accurate measurements from sensors. In particular, Light Detection And Ranging (LIDAR) measurements are typically treated as a zero-mean Gaussian distribution. We show that this assumption leads to predictable localisation drifts, especially when a bias related to measuring obstacles with high incidence angles is not taken into consideration. Moreover, we present a way to physically understand and model this bias, which generalises to multiple sensors. Using an experimental setup, we measured the bias of the Sick LMS151, Velodyne HDL-32E, and Robosense RS-LiDAR-16 as a function of depth and incidence angle, and showed that the bias can go up to 20 cm for high incidence angles. We then used our modelisations to remove the bias from the measurements, leading to more accurate maps and a reduced localisation drift.