 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR Enhanced Structure-from-Motion
Paper and Code
Nov 08, 2019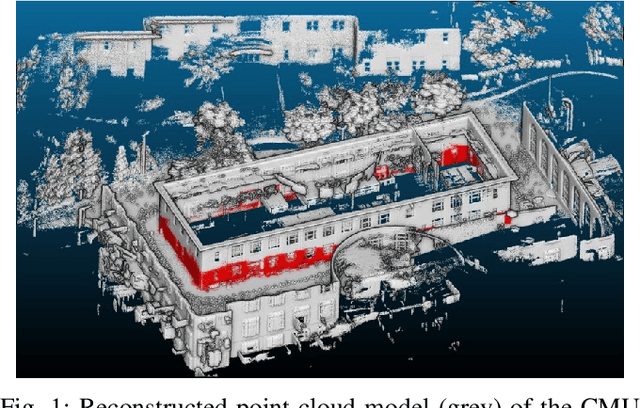
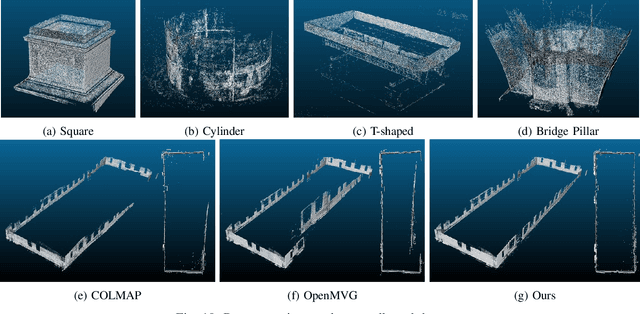
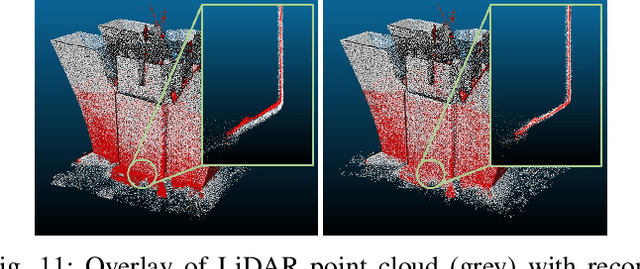
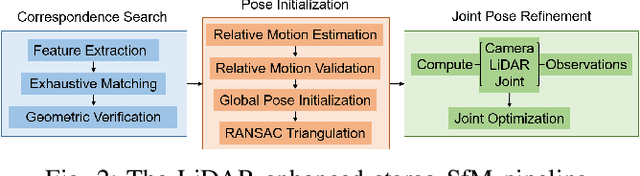
Although Structure-from-Motion (SfM) as a maturing technique has been widely used in many applications, state-of-the-art SfM algorithms are still not robust enough in certain situations. For example, images for inspection purposes are often taken in close distance to obtain detailed textures, which will result in less overlap between images and thus decrease the accuracy of estimated motion. In this paper, we propose a LiDAR-enhanced SfM pipeline that jointly processes data from a rotating LiDAR and a stereo camera pair to estimate sensor motions. We show that incorporating LiDAR helps to effectively reject falsely matched images and significantly improve the model consistency in large-scale environments. Experiments are conducted in different environments to test the performance of the proposed pipeline and comparison results with the state-of-the-art SfM algorithms are reported.