 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Equivariant Features for Absolute Pose Regression
Paper and Code
Apr 05, 2022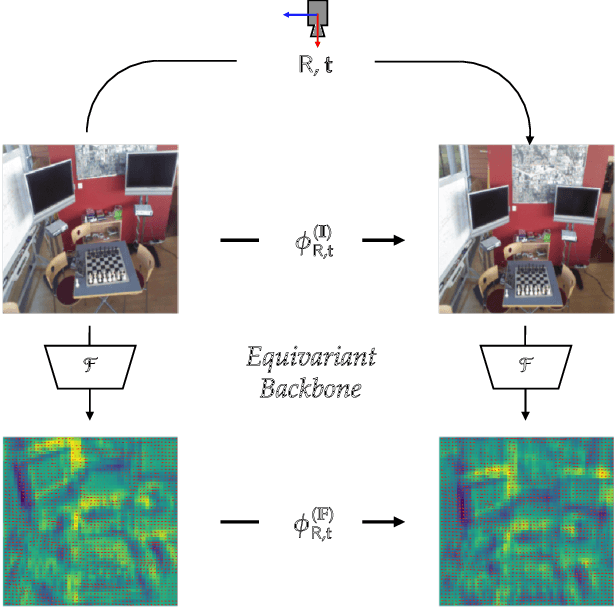
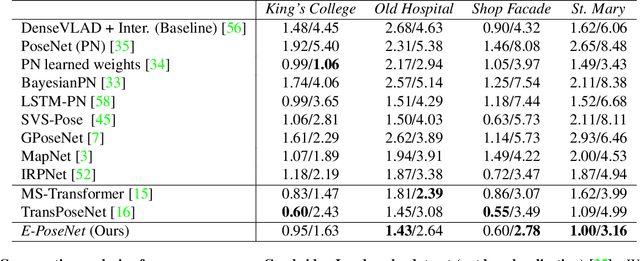
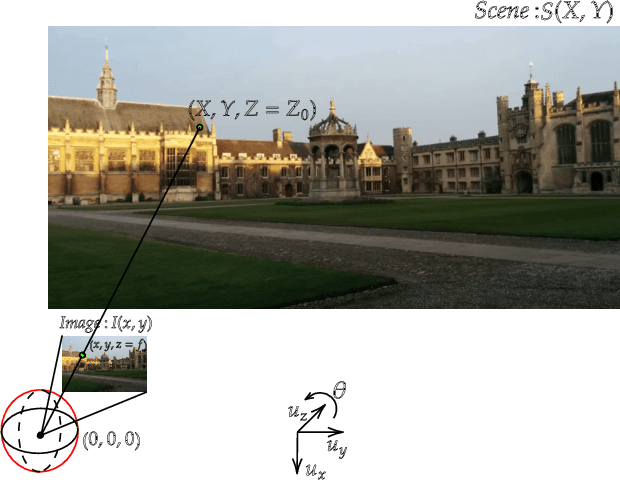
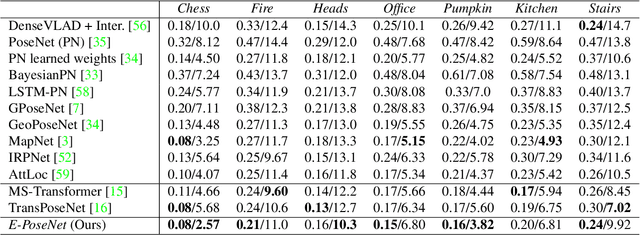
While end-to-end approaches have achieved state-of-the-art performance in many perception tasks, they are not yet able to compete with 3D geometry-based methods in pose estimation. Moreover, absolute pose regression has been shown to be more related to image retrieval. As a result, we hypothesize that the statistical features learned by classical Convolutional Neural Networks do not carry enough geometric information to reliably solve this inherently geometric task. In this paper, we demonstrate how a translation and rotation equivariant Convolutional Neural Network directly induces representations of camera motions into the feature space. We then show that this geometric property allows for implicitly augmenting the training data under a whole group of image plane-preserving transformations. Therefore, we argue that directly learning equivariant features is preferable than learning data-intensive intermediate representations. Comprehensive experimental validation demonstrates that our lightweight model outperforms existing ones on standard datasets.