 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Rearrange with Physics-Inspired Risk Awareness
Paper and Code
Jun 26, 2022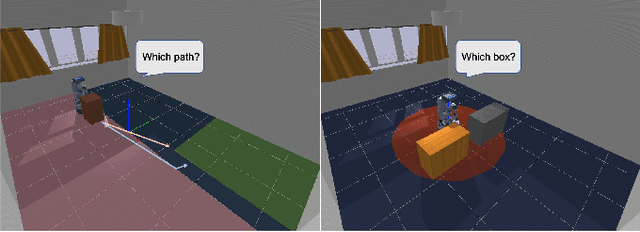
Real-world applications require a robot operating in the physical world with awareness of potential risks besides accomplishing the task. A large part of risky behaviors arises from interacting with objects in ignorance of affordance. To prevent the agent from making unsafe decisions, we propose to train a robotic agent by reinforcement learning to execute tasks with an awareness of physical properties such as mass and friction in an indoor environment. We achieve this through a novel physics-inspired reward function that encourages the agent to learn a policy discerning different masses and friction coefficients. We introduce two novel and challenging indoor rearrangement tasks -- the variable friction pushing task and the variable mass pushing task -- that allow evaluation of the learned policies in trading off performance and physics-inspired risk. Our results demonstrate that by equipping with the proposed reward, the agent is able to learn policies choosing the pushing targets or goal-reaching trajectories with minimum physical cost, which can be further utilized as a precaution to constrain the agent's behavior in a safety-critic environment.