 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Gather without Communication
Paper and Code
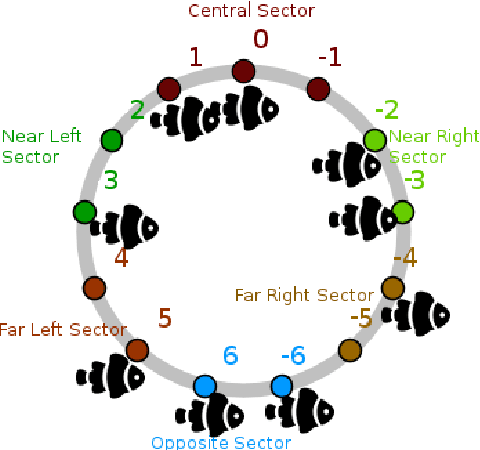
A standard belief on emerging collective behavior is that it emerges from simple individual rules. Most of the mathematical research on such collective behavior starts from imperative individual rules, like always go to the center. But how could an (optimal) individual rule emerge during a short period within the group lifetime, especially if communication is not available. We argue that such rules can actually emerge in a group in a short span of time via collective (multi-agent) reinforcement learning, i.e learning via rewards and punishments. We consider the gathering problem: several agents (social animals, swarming robots...) must gather around a same position, which is not determined in advance. They must do so without communication on their planned decision, just by looking at the position of other agents. We present the first experimental evidence that a gathering behavior can be learned without communication in a partially observable environment. The learned behavior has the same properties as a self-stabilizing distributed algorithm, as processes can gather from any initial state (and thus tolerate any transient failure). Besides, we show that it is possible to tolerate the brutal loss of up to 90\% of agents without significant impact on the behavior.