 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Filter with Predictive State Inference Machines
Paper and Code
May 30, 2016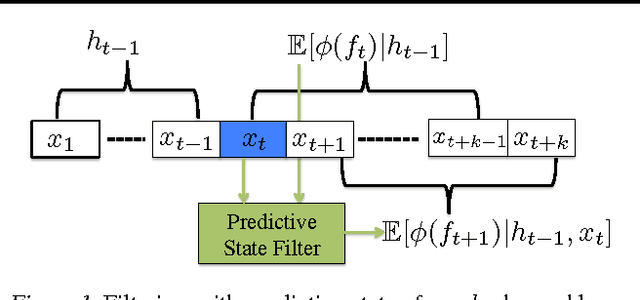


Latent state space models are a fundamental and widely used tool for modeling dynamical systems. However, they are difficult to learn from data and learned models often lack performance guarantees on inference tasks such as filtering and prediction. In this work, we present the PREDICTIVE STATE INFERENCE MACHINE (PSIM), a data-driven method that considers the inference procedure on a dynamical system as a composition of predictors. The key idea is that rather than first learning a latent state space model, and then using the learned model for inference, PSIM directly learns predictors for inference in predictive state space. We provide theoretical guarantees for inference, in both realizable and agnostic settings, and showcase practical performance on a variety of simulated and real world robotics benchmarks.