 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Tactile Models for Factor Graph-based State Estimation
Paper and Code
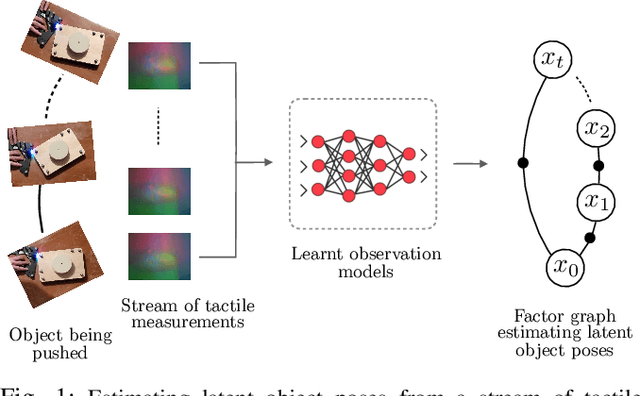
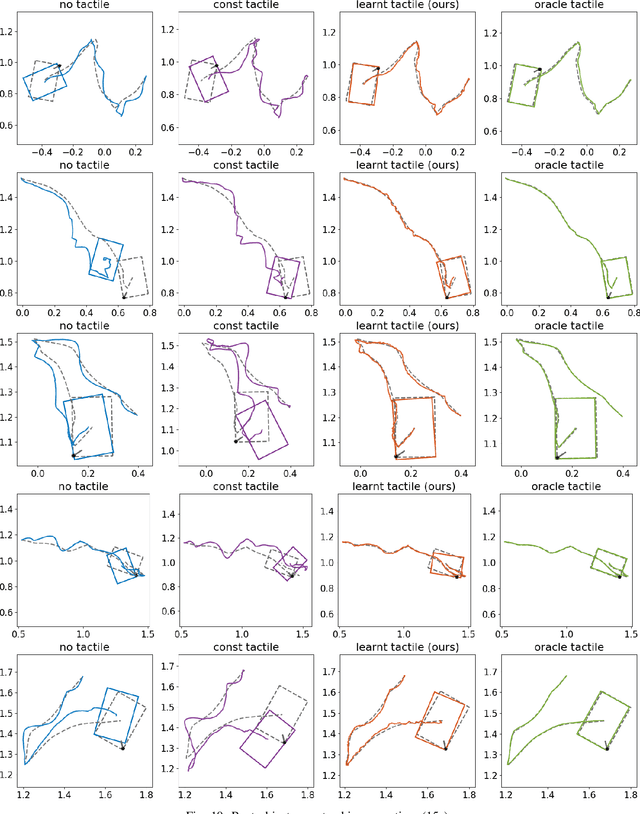
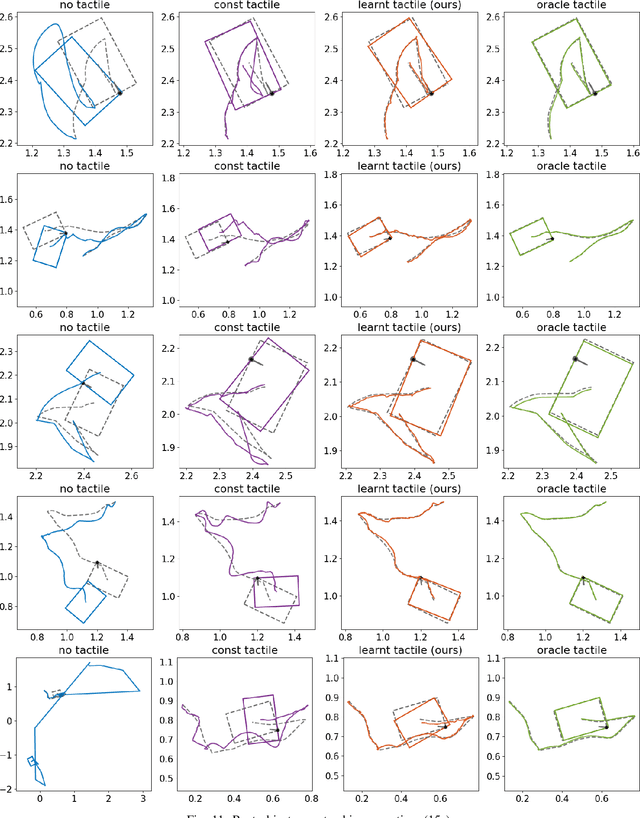
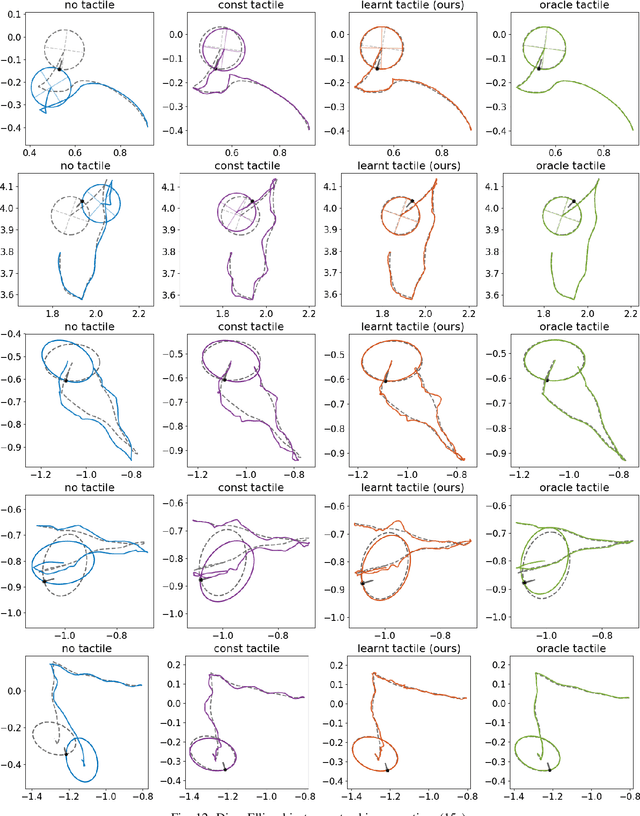
We address the problem of estimating object pose from touch during manipulation under occlusion. Vision-based tactile sensors provide rich, local measurements at the point of contact. A single such measurement, however, contains limited information and multiple measurements are needed to infer latent object state. We solve this inference problem using a factor graph. In order to incorporate tactile measurements in the graph, we need local observation models that can map high-dimensional tactile images onto a low-dimensional state space. Prior work has used low-dimensional force measurements or hand-designed functions to interpret tactile measurements. These methods, however, can be brittle and difficult to scale across objects and sensors. Our key insight is to directly learn tactile observation models that predict the relative pose of the sensor given a pair of tactile images. These relative poses can then be incorporated as factors within a factor graph. We propose a two-stage approach: first we learn local tactile observation models supervised with ground truth data, and then integrate these models along with physics and geometric factors within a factor graph optimizer. We demonstrate reliable object tracking using only tactile feedback for over 150 real-world planar pushing sequences with varying trajectories across three object shapes. Supplementary video: https://youtu.be/gp5fuIZTXMA