 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning rich touch representations through cross-modal self-supervision
Paper and Code
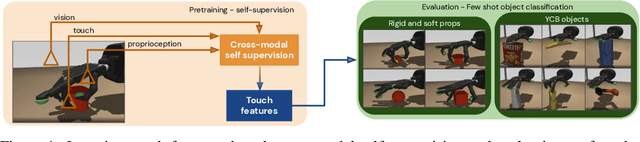
The sense of touch is fundamental in several manipulation tasks, but rarely used in robot manipulation. In this work we tackle the problem of learning rich touch features from cross-modal self-supervision. We evaluate them identifying objects and their properties in a few-shot classification setting. Two new datasets are introduced using a simulated anthropomorphic robotic hand equipped with tactile sensors on both synthetic and daily life objects. Several self-supervised learning methods are benchmarked on these datasets, by evaluating few-shot classification on unseen objects and poses. Our experiments indicate that cross-modal self-supervision effectively improves touch representation, and in turn has great potential to enhance robot manipulation skills.