 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Planning Abstractions from Language
Paper and Code
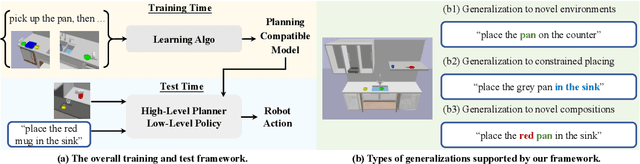


This paper presents a framework for learning state and action abstractions in sequential decision-making domains. Our framework, planning abstraction from language (PARL), utilizes language-annotated demonstrations to automatically discover a symbolic and abstract action space and induce a latent state abstraction based on it. PARL consists of three stages: 1) recovering object-level and action concepts, 2) learning state abstractions, abstract action feasibility, and transition models, and 3) applying low-level policies for abstract actions. During inference, given the task description, PARL first makes abstract action plans using the latent transition and feasibility functions, then refines the high-level plan using low-level policies. PARL generalizes across scenarios involving novel object instances and environments, unseen concept compositions, and tasks that require longer planning horizons than settings it is trained on.