Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning of Multi-Context Models for Autonomous Underwater Vehicles
Paper and Code
Sep 17, 2018
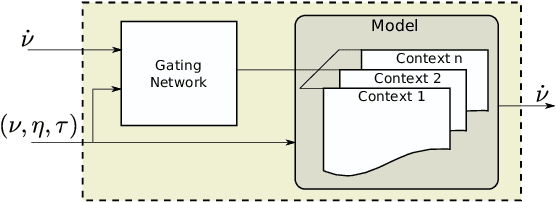
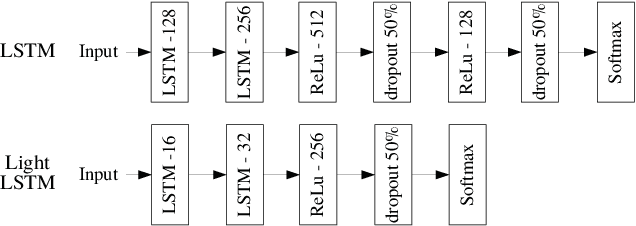
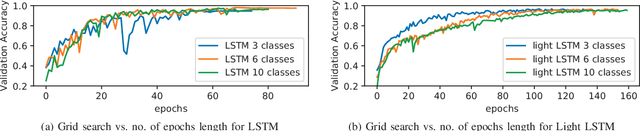
Multi-context model learning is crucial for marine robotics where several factors can cause disturbances to the system's dynamics. This work addresses the problem of identifying multiple contexts of an AUV model. We build a simulation model of the robot from experimental data, and use it to fill in the missing data and generate different model contexts. We implement an architecture based on long-short-term-memory (LSTM) networks to learn the different contexts directly from the data. We show that the LSTM network can achieve high classification accuracy compared to baseline methods, showing robustness against noise and scaling efficiently on large datasets.
* 6 pages, 7 figures, AUV 2018 author copy
View paper on