 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Inertial Odometry for Dynamic Legged Robot State Estimation
Paper and Code
Nov 01, 2021


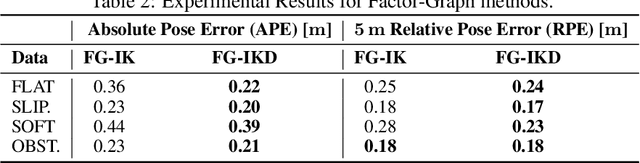
This paper introduces a novel proprioceptive state estimator for legged robots based on a learned displacement measurement from IMU data. Recent research in pedestrian tracking has shown that motion can be inferred from inertial data using convolutional neural networks. A learned inertial displacement measurement can improve state estimation in challenging scenarios where leg odometry is unreliable, such as slipping and compressible terrains. Our work learns to estimate a displacement measurement from IMU data which is then fused with traditional leg odometry. Our approach greatly reduces the drift of proprioceptive state estimation, which is critical for legged robots deployed in vision and lidar denied environments such as foggy sewers or dusty mines. We compared results from an EKF and an incremental fixed-lag factor graph estimator using data from several real robot experiments crossing challenging terrains. Our results show a reduction of relative pose error by 37% in challenging scenarios when compared to a traditional kinematic-inertial estimator without learned measurement. We also demonstrate a 22% reduction in error when used with vision systems in visually degraded environments such as an underground mine.