 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Generalizable Manipulation Policies with Object-Centric 3D Representations
Paper and Code



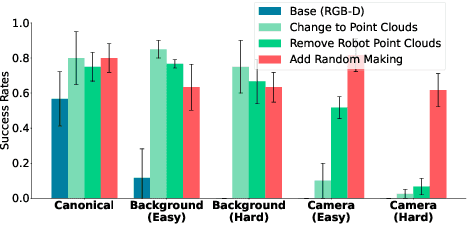
We introduce GROOT, an imitation learning method for learning robust policies with object-centric and 3D priors. GROOT builds policies that generalize beyond their initial training conditions for vision-based manipulation. It constructs object-centric 3D representations that are robust toward background changes and camera views and reason over these representations using a transformer-based policy. Furthermore, we introduce a segmentation correspondence model that allows policies to generalize to new objects at test time. Through comprehensive experiments, we validate the robustness of GROOT policies against perceptual variations in simulated and real-world environments. GROOT's performance excels in generalization over background changes, camera viewpoint shifts, and the presence of new object instances, whereas both state-of-the-art end-to-end learning methods and object proposal-based approaches fall short. We also extensively evaluate GROOT policies on real robots, where we demonstrate the efficacy under very wild changes in setup. More videos and model details can be found in the appendix and the project website: https://ut-austin-rpl.github.io/GROOT .