 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from My Partner's Actions: Roles in Decentralized Robot Teams
Paper and Code
Oct 28, 2019

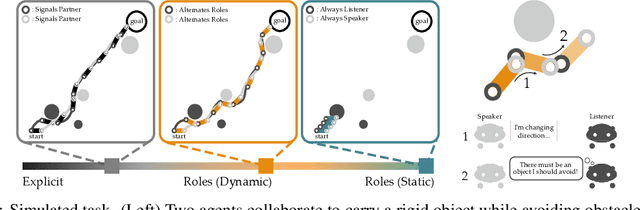

When teams of robots collaborate to complete a task, communication is often necessary. Like humans, robot teammates should implicitly communicate through their actions: but interpreting our partner's actions is typically difficult, since a given action may have many different underlying reasons. Here we propose an alternate approach: instead of not being able to infer whether an action is due to exploration, exploitation, or communication, we define separate roles for each agent. Because each role defines a distinct reason for acting (e.g., only exploit, only communicate), teammates now correctly interpret the meaning behind their partner's actions. Our results suggest that leveraging and alternating roles leads to performance comparable to teams that explicitly exchange messages. You can find more images and videos of our experimental setups at http://ai.stanford.edu/blog/learning-from-partners/.