 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Contact-Rich Manipulation Tasks with Rigid Position-Controlled Robots: Learning to Force Control
Paper and Code
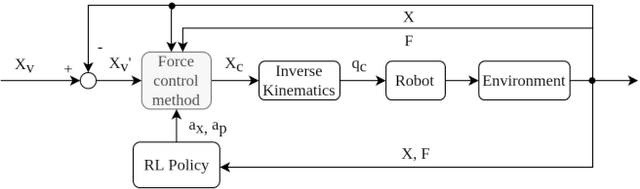
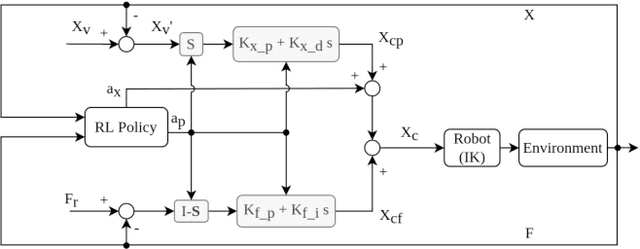
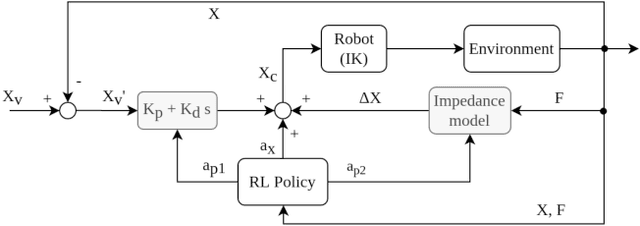
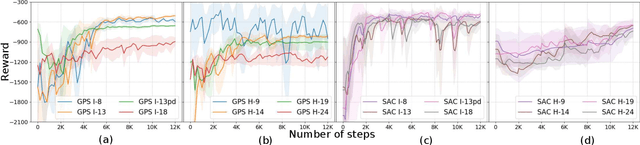
To fully realize industrial automation, it is indispensable to give the robot manipulators the ability to adapt by themselves to their surroundings and to learn to handle novel manipulation tasks. Reinforcement Learning (RL) methods have been proven successful in solving manipulation tasks autonomously. However, RL is still not widely adopted on real robotic systems because working with real hardware entails additional challenges, especially when using rigid position-controlled manipulators. These challenges include the need for a robust controller to avoid undesired behavior, that risk damaging the robot and its environment, and constant supervision from a human operator. The main contributions of this work are, first, we propose a framework for safely training an RL agent on manipulation tasks using a rigid robot. Second, to enable a position-controlled manipulator to perform contact-rich manipulation tasks, we implemented two different force control schemes based on standard force feedback controllers; one is a modified hybrid position-force control, and the other one is an impedance control. Third, we empirically study both control schemes when used as the action representation of an RL agent. We evaluate the trade-off between control complexity and performance by comparing several versions of the control schemes, each with a different number of force control parameters. The proposed methods are validated both on simulation and a real robot, a UR3 e-series robotic arm when executing contact-rich manipulation tasks.