 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Collaborative Agents with Rule Guidance for Knowledge Graph Reasoning
Paper and Code
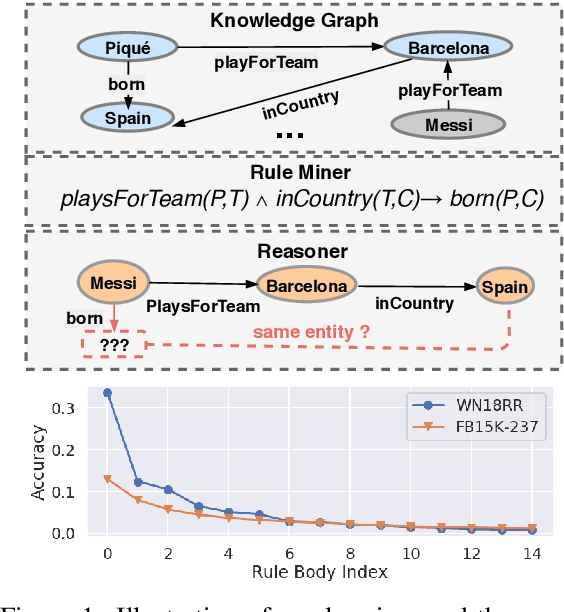
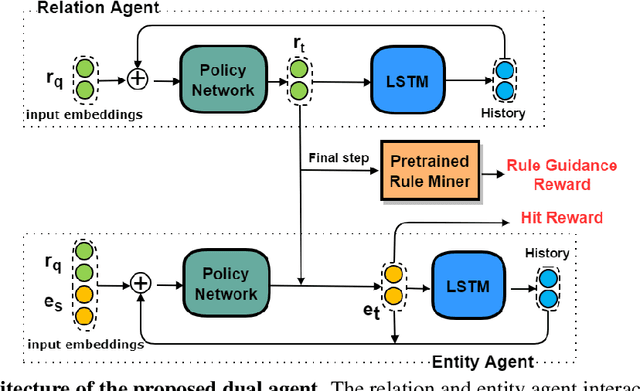
Walk-based models have shown their unique advantages in knowledge graph (KG) reasoning by achieving state-of-the-art performance while allowing for explicit visualization of the decision sequence. However, the sparse reward signals offered by the KG during a traversal are often insufficient to guide a sophisticated reinforcement learning (RL) model. An alternate approach to KG reasoning is using traditional symbolic methods (e.g., rule induction), which achieve high precision without learning but are hard to generalize due to the limitation of symbolic representation. In this paper, we propose to fuse these two paradigms to get the best of both worlds. Our method leverages high-quality rules generated by symbolic-based methods to provide reward supervision for walk-based agents. Due to the structure of symbolic rules with their entity variables, we can separate our walk-based agent into two sub-agents thus allowing for additional efficiency. Experiments on public datasets demonstrate that walk-based models can benefit from rule guidance significantly.