 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Camera Miscalibration Detection
Paper and Code

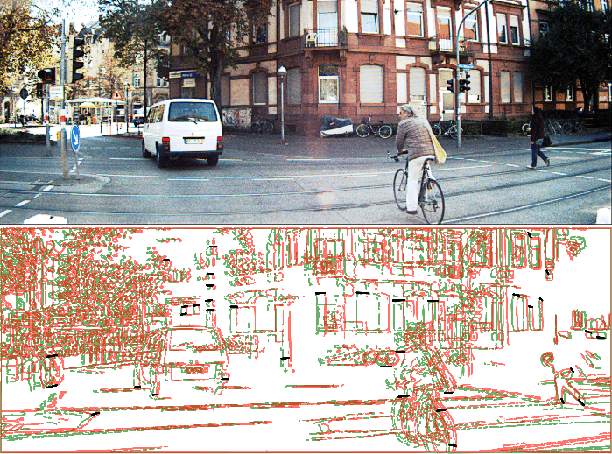
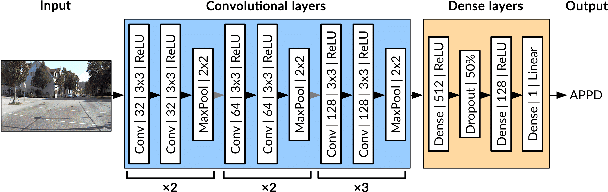
Self-diagnosis and self-repair are some of the key challenges in deploying robotic platforms for long-term real-world applications. One of the issues that can occur to a robot is miscalibration of its sensors due to aging, environmental transients, or external disturbances. Precise calibration lies at the core of a variety of applications, due to the need to accurately perceive the world. However, while a lot of work has focused on calibrating the sensors, not much has been done towards identifying when a sensor needs to be recalibrated. This paper focuses on a data-driven approach to learn the detection of miscalibration in vision sensors, specifically RGB cameras. Our contributions include a proposed miscalibration metric for RGB cameras and a novel semi-synthetic dataset generation pipeline based on this metric. Additionally, by training a deep convolutional neural network, we demonstrate the effectiveness of our pipeline to identify whether a recalibration of the camera's intrinsic parameters is required or not. The code is available at http://github.com/ethz-asl/camera_miscalib_detection.