 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Based Wiping Behavior of Low-Rigidity Robots Considering Various Surface Materials and Task Definitions
Paper and Code
Mar 17, 2024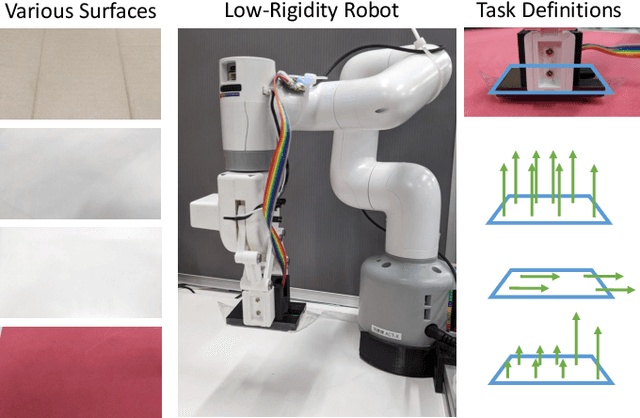
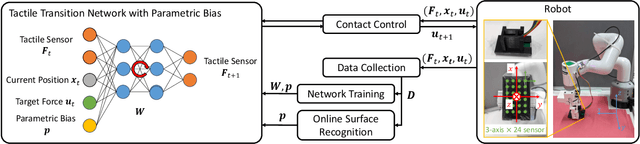
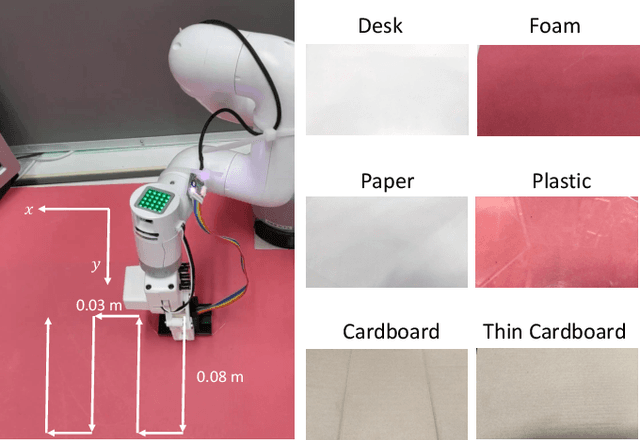
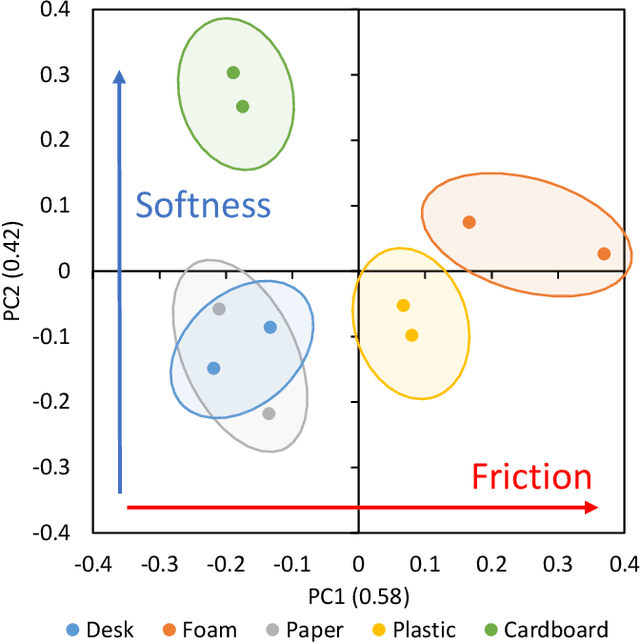
Wiping behavior is a task of tracing the surface of an object while feeling the force with the palm of the hand. It is necessary to adjust the force and posture appropriately considering the various contact conditions felt by the hand. Several studies have been conducted on the wiping motion, however, these studies have only dealt with a single surface material, and have only considered the application of the amount of appropriate force, lacking intelligent movements to ensure that the force is applied either evenly to the entire surface or to a certain area. Depending on the surface material, the hand posture and pressing force should be varied appropriately, and this is highly dependent on the definition of the task. Also, most of the movements are executed by high-rigidity robots that are easy to model, and few movements are executed by robots that are low-rigidity but therefore have a small risk of damage due to excessive contact. So, in this study, we develop a method of motion generation based on the learned prediction of contact force during the wiping motion of a low-rigidity robot. We show that MyCobot, which is made of low-rigidity resin, can appropriately perform wiping behaviors on a plane with multiple surface materials based on various task definitions.