 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning a Sequential Policy of Efficient Actions for Tangled-Prone Parts in Robotic Bin Picking
Paper and Code
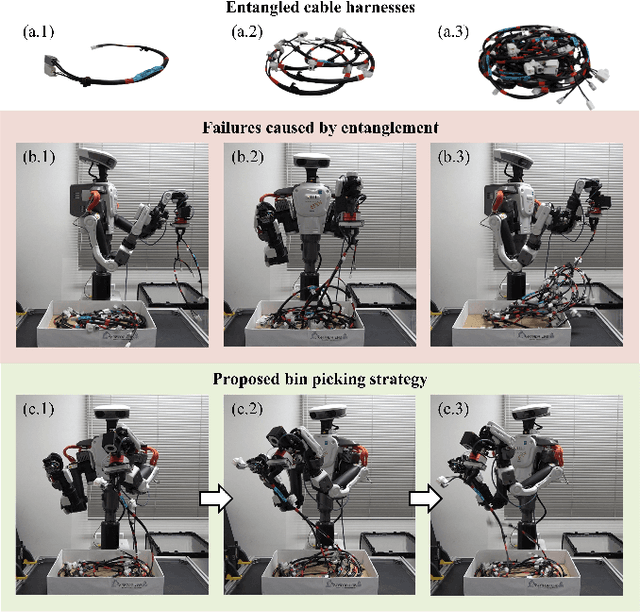
This paper introduces an autonomous bin picking system for cable harnesses - an extremely challenging object in bin picking task. Currently cable harnesses are unsuitable to be imported to automated production due to their length and elusive structures. Considering the task of robotic bin picking where the harnesses are heavily entangled, it is challenging for a robot to pick harnesses up one by one using conventional bin picking methods. In this paper, we present an efficient approach to overcoming the difficulties when dealing with entangled-prone parts. We develop several motion schemes for the robot to pick up a single harness avoiding any entanglement. Moreover, we proposed a learning-based bin picking policy to select both grasps and designed motion schemes in a reasonable sequence. Our method is unique due to the novelty for sufficiently solving the entanglement problem in picking cluttered cable harnesses. We demonstrate our approach on a set of real-world experiments, during which the proposed method is capable to perform the sequential bin picking task with both effectiveness and accuracy under a variety of cluttered scenarios.