 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLCD -- Line Clustering and Description for Place Recognition
Paper and Code

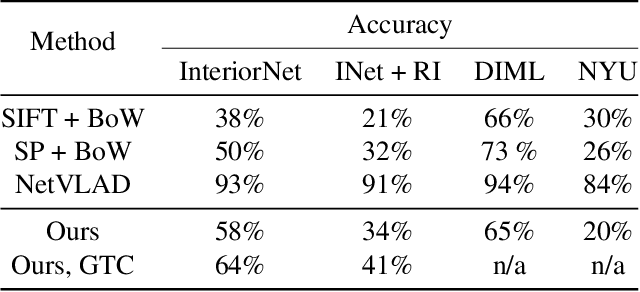
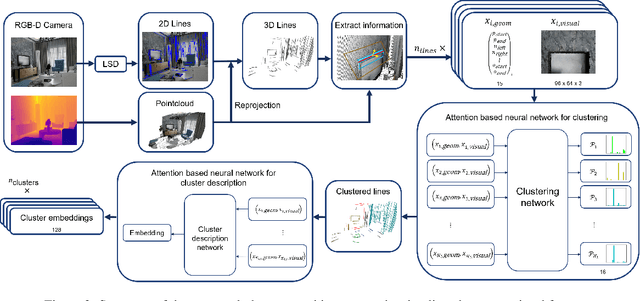
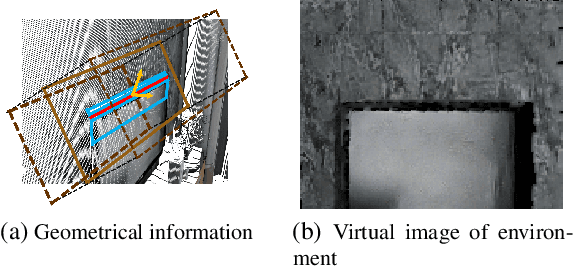
Current research on visual place recognition mostly focuses on aggregating local visual features of an image into a single vector representation. Therefore, high-level information such as the geometric arrangement of the features is typically lost. In this paper, we introduce a novel learning-based approach to place recognition, using RGB-D cameras and line clusters as visual and geometric features. We state the place recognition problem as a problem of recognizing clusters of lines instead of individual patches, thus maintaining structural information. In our work, line clusters are defined as lines that make up individual objects, hence our place recognition approach can be understood as object recognition. 3D line segments are detected in RGB-D images using state-of-the-art techniques. We present a neural network architecture based on the attention mechanism for frame-wise line clustering. A similar neural network is used for the description of these clusters with a compact embedding of 128 floating point numbers, trained with triplet loss on training data obtained from the InteriorNet dataset. We show experiments on a large number of indoor scenes and compare our method with the bag-of-words image-retrieval approach using SIFT and SuperPoint features and the global descriptor NetVLAD. Trained only on synthetic data, our approach generalizes well to real-world data captured with Kinect sensors, while also providing information about the geometric arrangement of instances.